Projektförderung
Hintergrund

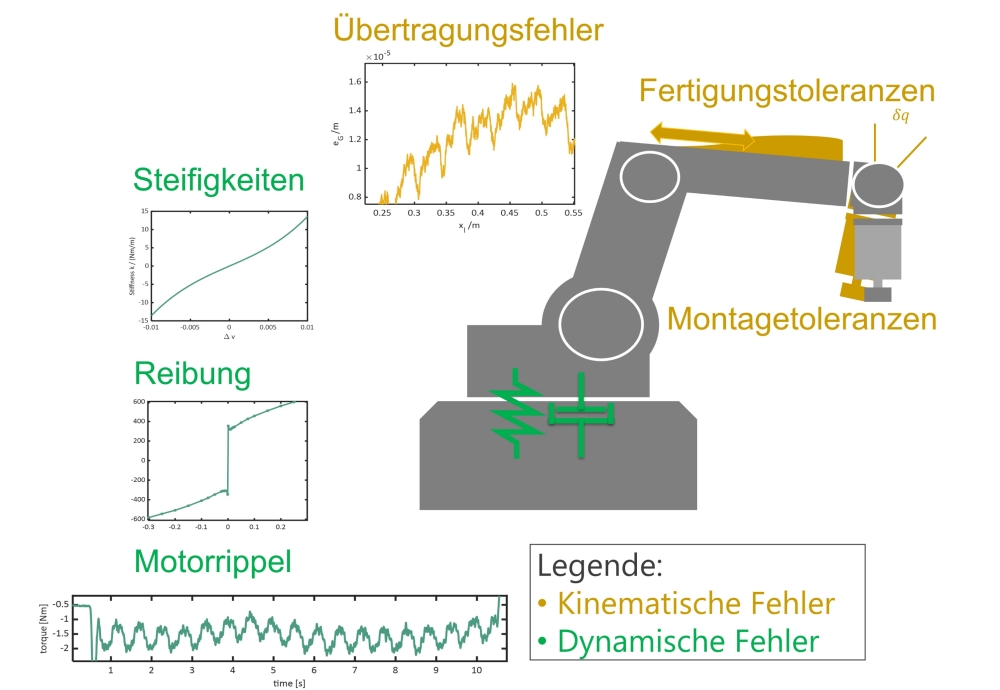
Präzisere Dynamikmodelle von Maschinen sind die Voraussetzung für eine schnellere und dynamisch genauere Fertigung. Die erzielbare Genauigkeit, Bearbeitungsgeschwindigkeit und Ausschussquote sind dabei durch die Qualität der Methodik für Modellierung und Identifikation begrenzt. Für mechatronische Systeme, wie Werkzeugmaschinen oder Industrieroboter, treten unabhängig von der Art der Vorschubachsen übertragbare nichtlineare Effekte in Kinematik und Dynamik auf. Diese sind maschinenindividuell, beispielsweise abhängig von Fertigungs- und Montagetoleranzen.
Problemstellung
Die aktuelle Steuerungstechnik kaskadierte Regelschleifen für jede Achse, die modellfrei und einfach parametrierbar sind. Bekannte Modellinformation, insbesondere über maschinenindividuelle Nichtlinearitäten werden nicht genutzt. Besonders bei höherer Dynamik stößt die Kaskadenregelung jedoch an ihre Grenzen, das Ergebnis sind wachsende Schleppfehler, die sich auch in der Werkstückkontur ausprägen.
Detaillierte Dynamikmodelle der Maschinen werden aus verschiedenen Gründen nicht genutzt:
- Eine maschineindividuelle Identifikation ist mit einer Vielzahl an Versuchen verbunden, der Mehrwert ist vergleichsweise gering.
- Verfahren, die auf genaueren Modellen basieren, erfordern einen höheren Identifikationsaufwand und benötigen mehr Zustandsgrößen zur Regelung (meist aus Ableitungen gewonnen). Hier können eigentlich genauere Verfahren zu schlechteren Reglern führen. Die Sollwerte der Maschine, welche aus der CNC stammen, bieten hierfür ebenfalls nicht die benötigte Detailtiefe und müssen für die Anwendung gefiltert werden, wodurch sich ein Dynamikverlust ergibt.
- Die Modelle müssen auf der Steuerung in Echtzeit (in der Regel im kHz-Takt) rechenbar sein.
Insgesamt ergibt sich hieraus ein interdisziplinäres Problemfeld in den Teilgebieten Systemtheorie, Regelungstechnik, maschinelles Lernen, Steuerungstechnik und Informatik, welches innerhalb der ICM-Nachwuchsgruppe untersucht wird.
Zielsetzung/Ergebnisse
Im Rahmen der Nachwuchsgruppe wird die Methode der Greyboxmodellierung für mechatronische Systeme untersucht und, darauf aufbauend, die maschinenangepasste Regelung und Sollwertgenerierung. Die Greybox-Modelle bestehen dabei aus einem analytischen Modellteil, der das grundsätzliche Bewegungsverhalten der Maschine beschreibt und schnell identifiziert werden kann, sowie aus einem datengetriebenen Blackbox-Modellteil. Letzterer wird auf dem Residuum trainiert, also dem Fehler zwischen physikalischem System und dessen analytischer Modellierung. Hierdurch soll sich eine geringere Datenmenge ausreichen und zur schnelleren Konvergenz aufgrund einer besseren Skalierung der Trainingsdaten führen.
Die Vorteile der Aufteilung in einen analytischen und einen datengetriebenen Modellteil sind:
- Genauere, maschinenspezifische Modelle durch datengetriebenes Nachtraining der Fehler
- Weniger Trainingsdaten notwendig (Training des verbleibenden Fehlers statt des grundsätzlichen Bewegungsverhaltens)
- Das analytische Modell kann bei niedrigem Modellvertrauen als Fallback-Modell genutzt werden
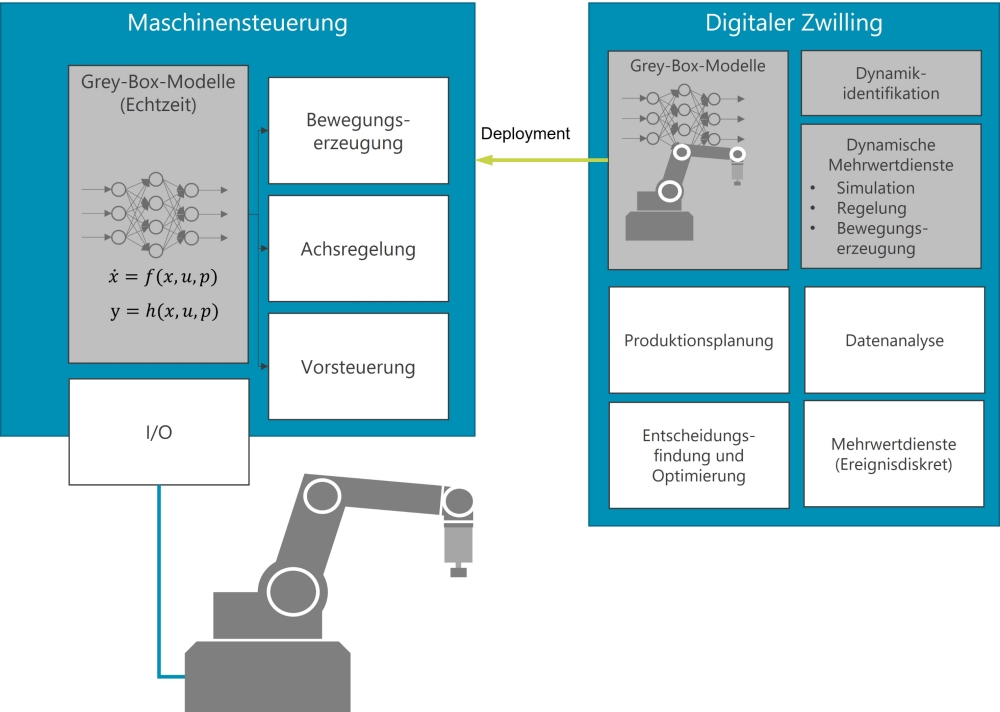
Für die entwickelte Greybox-Methode wird gleichzeitig an einer industrienahen Umsetzung geforscht. Dabei steht die Implementierung und praktische auf industrieller Hardware, insbesondere direkt auf SPS und CNC im Vordergrund, eine Herausforderung ist die Integration in die Regelschleifen sowie das schnelle Berechnen der Machine-Learning-Modelle im Echtzeittakt.
Der Mehrwert der Methodik liegt einerseits in genaueren Maschinenbewegungen, beispielsweise von Robotern bei der Montage oder beim Schweißen von Karosserien, anderseits können Prozesse bei gleicher Genauigkeit schneller und mit höherem Durchsatz als zuvor durchgeführt werden, wodurch die Kosten pro Werkstück reduziert werden.
Erste Ergebnisse konnten auf der SPS-Messe 2023 sowie dem Strategiedialog Automobilwirtschaft 2023 präsentiert werden.


Ihr Ansprechpartner

Christoph Hinze
Dr.-Ing.Leiter ICM-Nachwuchsgruppe "Grey-Box-Modellierung für die Fertigungstechnik"

Haijia Xu
M.Sc.Wissenschaftlicher Mitarbeiter "Mechatronische Systeme und Prozesse"

Zexu Zhou
M.Sc.Wissenschaftlicher Mitarbeiter "Mechatronische Systeme und Prozesse"