
Projektförderung

Hintergrund
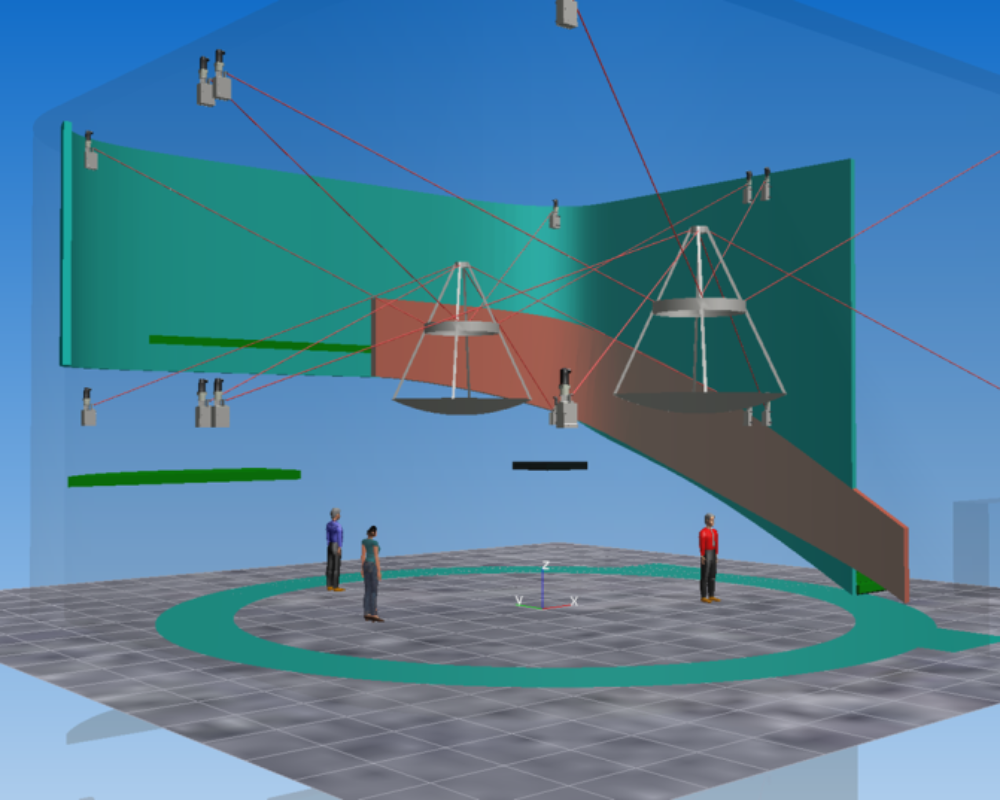
Für den Deutschen Pavillon auf der Weltausstellung 2015 in Mailand ist das zentrale Element ein großer Theaterraum, in dem sich über den Köpfen von ca. 250 Zuschauern zwei riesige Bienenaugen bewegen.
Technisch sind diese Bienenaugen zwei sehr große Seilroboter. Die Universität Stuttgart nahm sich der Aufgabe an, diese Seilroboter zu entwerfen, zu simulieren und die Bewegungsplanung bereitzustellen. Dafür war es jedoch erforderlich, zunächst Grundlagenforschung zu betreiben, um das Rüstzeug für diese Aufgaben bereitstellen zu können.
Zwei Institute der Universität Stuttgart waren an diesen Arbeiten beteiligt, das Institut für Technische und Numerische Mechanik (ITM) unter Leitung von Prof. Dr.-Ing. Peter Eberhard, und ein Team des Institut für Steuerungstechnik der Werkzeugmaschinen und Fertigungseinrichtungen (ISW) unter Junior-Professor Dr.-Ing. Andreas Pott. Das ITM kümmerte sich dabei vor allem um die Bahnplanung und -definition, während sich das ISW um die Steuerung, Auslegung, Konzeption und Sicherheitsfragen von Seilrobotern kümmerte.
Problemstellung
Seilroboter sind eine spezielle Klasse paralleler Roboter, bei denen die starren Antriebsketten durch flexible Seile ersetzt werden, welches die wesentliche Eigenschaft dieses Typs von Roboter darstellt. Durch die notwendige Forderung an die Anzahl der Seile – es müssen mehr Seile eingesetzt als Freiheitsgrade zu kontrollieren sind – ergeben sich, mathematisch gesehen, überbestimmte Bindungsgleichungen, welche eine Vielzahl möglicher Lösungen ergeben.
Das Lösen dieser Gleichungen ist ein erster Schritt in Richtung der Bestimmung der Auslegung der Seilroboter für die EXPO. Das ISW hat im Rahmen der Forschung an Seilrobotern die Kinematik und Dynamik dieser Roboter simulativ untersucht, um eine möglichst gute Ausnutzung der Ausstellungs- bzw. Showfläche zu erlangen, dies unter Berücksichtigung von Sicherheitsaspekten, der gegebenen Geometrie des Pavillons und der darin eingebrachten „Fremdobjekten“ und den zur Steuerung notwendigen Leistung der Antriebsstränge.
Bahnverifikation als entscheidender Aspekt
Neben der Erarbeitung von Methoden für die Auslegung der beiden Seilroboter für die EXPO war auch die Bahnverifikation ein entscheidender Aspekt der Forschung. Hierbei geht es darum, die mithilfe des Werkzeugs des ITM entworfenen Trajektorien dahin gehend zu überprüfen, dass diese mit den entworfenen Seilrobotern abgefahren werden können. Dabei ist sind eine ganze Reihe von Kriterien zu prüfen, damit es nicht zu Seilkollisionen oder zu zu hohen Seilkräften kommt. Jedes dieser Kriterien wurde mit detailliert Modellierung und mit einem Berechnungsverfahren hinterlegt. Damit wurde eine Vielzahl von Tests definiert und implementiert, um den sicheres Betreiben der Seilroboternüber einer gesamten Bewegung zu gewährleisten.
Die entworfenen Tests umfassen weiterhin die Prüfung der Erreichbarkeit von Posen anhand definierter Grenzen der Seilkräfte und -längen, das Einhalten der Geschwindigkeits- und Beschleunigungsgrenzen von sowohl Plattform als auch Antrieb, wie auch die Überprüfung auf Kollisionen von Plattform und Umgebung als auch von Seil und Seil. Alle Tests wurden in ein Softwaremodell gekapselt, welches zusammen mit dem Bahnplaner des ITM verwendet werden kann, so dass die Gültigkeit einer Bahn rasch und einfach geprüft werden kann.
Herleitung der Steuerungsbefehle
Ein weiterer, grundlegender Teil der Forschung befasste sich mit der Herleitung der Steuerungsbefehle für die eingesetzte Steuerung – auch Inverse Kinematik genannt. Dabei wird die vom Interface des ITMs bereitgestellte Trajektorie entsprechend einer fest definierten Zeitrate abgetastet und weitere Informationen wie das Geschwindigkeits- und Beschleunigungsprofil abgeleitet. Auf Basis dieser Darstellung der (kartesischen) Position des Seilroboters im Pavillon kann die Trajektorie in eine Reihe von korrespondierenden Seillängen umgewandelt werden, welche anschließend in eine von der Steuerung lesbare Form gebracht wird.
Für Seilroboter mit den Abmessungen wie in diesem Fall, besteht kein einfacher Zusammenhang zwischen Plattformposition und-orientierung, da die Ausrichtung der Umlenkrollen mit berücksichtigt werden muss, um die korrekte Seillänge zu bestimmen. Andernfalls werden abweichende Seillängen bestimmt, die zu Abweichungen der gefahrenen zur geplanten Trajektorie führt und ein undefiniertes Verhalten der Plattform nach sich ziehen können.

Zielsetzung/Ergebnisse
Unser Beitrag zur EXPO 2015 hat nicht nur neue wissenschaftliche Erkenntnisse gebracht im Bereich der parallelen Manipulatoren und vor allem der Seilroboter. Auch die Auslegung und Inbetriebnahme zweier solch großer Seilroboter war bisher in dieser Form nicht vollzogen worden - weder durch Deutsche Ingenieure noch andere Forschergruppen in dieser Welt. Darüber hinaus konnten das ISW neue Ergebnisse zur echtzeitfähigen Berechnung von Seilkollisionen und anderen sicherheitstechnisch relevanten Fragestellungen liefern und somit den Dauerbetrieb der beiden Seilroboter gewährleisten.
Dass es bei diesem Aufbau keinen Prototypen geben konnten und eine nicht verrückbare Eröffnungsfeier ein festes Ende an diese Projekt stellte, machte die theoretischen Arbeiten und Überlegungen umso spannender. Denn die Simulation musste bereits im Vorfeld viele Fragen beantworten.
Es freut uns außerordentlich, dass der Deutsche Pavillon und auch die Ausstellung des Deutschen Pavillons in Mailand mit einigen Auszeichnungen prämiert wurde.

Bilder der Expo 2015














Ihr Ansprechpartner

Armin Lechler
Dr.-Ing.Stellvertretende Institutsleitung
Geschäftsführender Oberingenieur