Projektförderung

Hintergrund
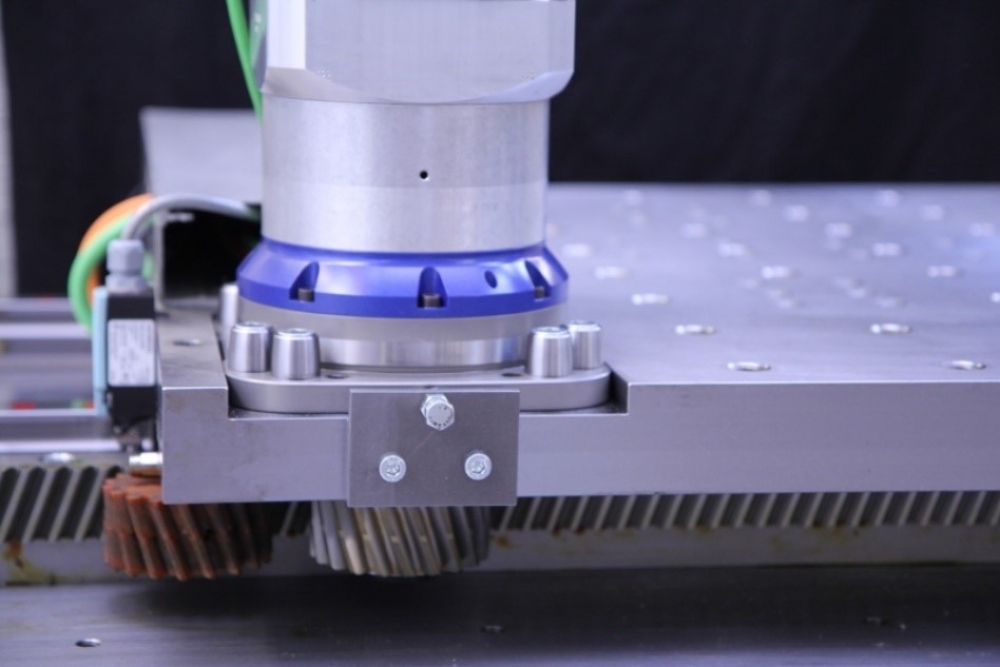
Zahnstange-Ritzel-Antriebe (ZRA) werden bevorzugt zur Erzeugung von langen Linearbewegungen mit hohen Vorschubkräften eingesetzt. Durch Aneinanderreihung stationärer Zahnstangenelemente können beliebig lange Verfahrwege realisiert werden, ohne die Steifigkeit des Systems zu reduzieren oder die bewegte Trägheit zu erhöhen. Ein zentrales bestehendes Problem ist jedoch die begrenzte Bahn- und Positioniergenauigkeit aufgrund des nichtidealen Gleichlaufverhaltens der Verzahnung.
Problemstellung
Der Gleichlauf beschreibt die Gleichförmigkeit der Vorschubbewegung bei konstanter Motordrehzahl und damit den Zusammenhang zwischen Rotation der Motorwelle und Translation des Maschinentisches. Das bei der Auslegung als ideal angenommene Übersetzungsverhältnis unterliegt in der Realität Schwankungen. Negativen Einfluss haben hierbei fertigungs- und montagebedingte Kinematikfehler an Zahnstange, Ritzel und im vorgelagerten Getriebe sowie die nichtlineare Struktur- und Kontaktnachgiebigkeit der Zähne im Eingriff. Es resultieren hochdynamische Positionsabweichungen, die auch mit einer direkten Messung der Tischposition nicht vollständig ausgeregelt werden können. Eine zuverlässige Vorhersage der Abweichungen zur Laufzeit ist bislang aufgrund der starken Individualität der Kinematikfehler in Verbindung mit den komplexen nichtlinearen Nachgiebigkeiten nicht möglich. Vor diesem Hintergrund finden Ansätze zur Kompensation der Gleichlauffehler bislang keine praktische Anwendung.
Zielsetzung/Ergebnisse
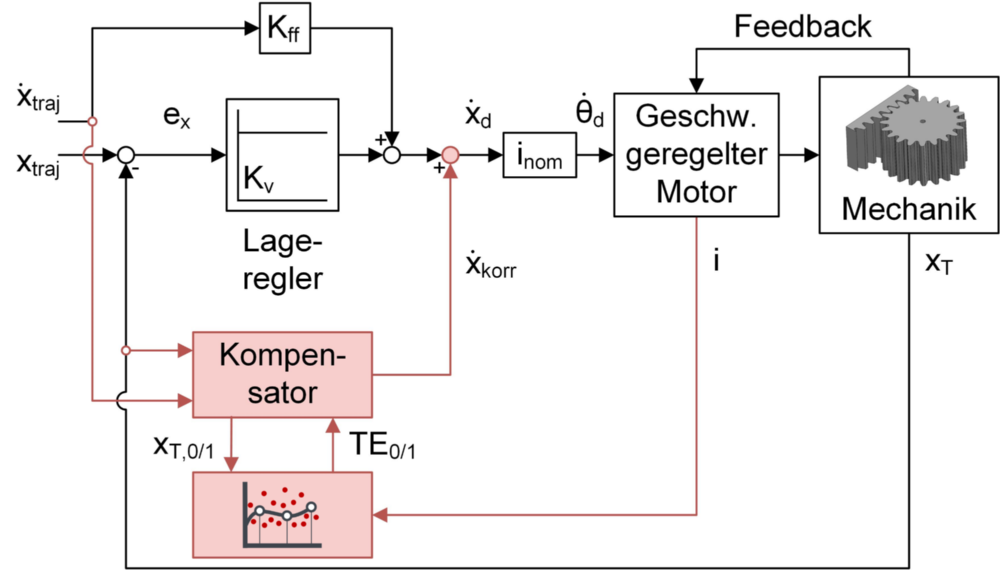
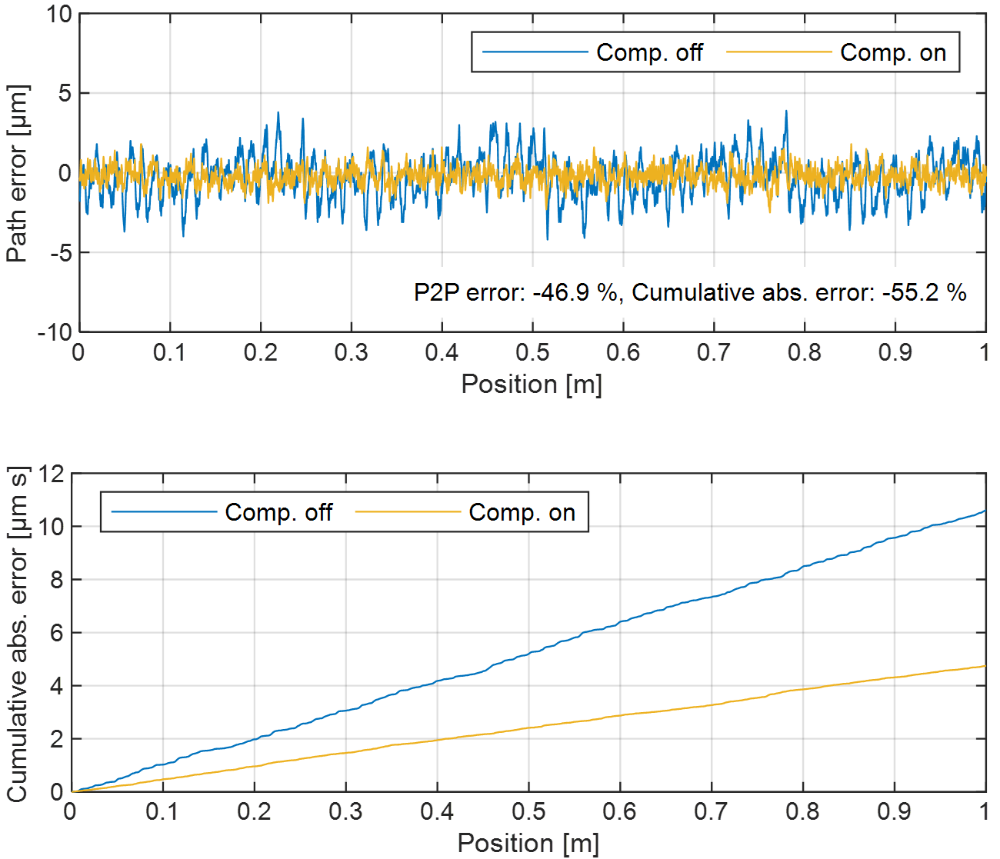
Im Rahmen des Projekts wird ein Ansatz zur Steigerung der Bahngenauigkeit von Zahnstange-Ritzel-Antrieben durch eine Kompensation der Gleichlauffehler entwickelt. Zu diesem Zweck wird ein Kompensator in die Achsregelung integriert, der die im Antriebsstrang auftretenden Bahnabweichungen durch Anpassung der Motorbewegung unterdrückt. Basis hierfür bilden zustandsabhängige Fehlermodelle, die das individuelle Gleichlaufverhalten des jeweiligen Antriebssystems abbilden. Eine initiale Modellidentifikation erfolgt im Rahmen der Inbetriebnahme in Form einer Vermessung der im Leerlauf auftretenden Kinematikfehler. Die lastabhängigen Nachgiebigkeiten werden ergänzend dazu durch Regressionsmodelle bereitgestellt, die während des Betriebs der Achse durch maschinelles Lernen auf das System angepasst werden. Optional kann hier eine initiale Modellparametrierung durch in FEM-Simulationen ermittelte Steifigkeitskennfelder erfolgen. Die entwickelte Methodik konnte in ersten Versuchen am einem Zahnstage-Ritzel Prüfstand mit Industriekomponenten validiert werden. Die durchgeführten Messungen zeigen eine deutliche Steigerung der Bahngenauigkeit über den gesamten Betriebsbereich.
Ihr Ansprechpartner

Lukas Steinle
M.Sc.Gruppenleiter "Antriebssysteme und -regelung"