Projektförderung
Hintergrund
Gesteigerte Funktionalität moderner Bordnetze in Elektrofahrzeugen erhöhen konsequent die Komplexität der Kabelbäume. Bei 60 kg Gewicht und einer Gesamtlänge von mehreren Kilometern ist der Kabelbaum einer der kostenintensivsten Komponenten in Fahrzeugen. Dabei sind Fehler bei einer falschen Handhabung des Kabelbaums teuer, die Arbeit mit dem Kabelbaum körperlich hoch anstrengend sowie die Fachkräfte für die manuelle Arbeit knapp. Deshalb wird in diesem Forschungsprojekt der Einsatz von Robotern zur Handhabung untersucht.
Problemstellung
Kabelbäume sind mangels robuster Prozesse und Modelle nicht automatisiert handhabbar. Prozesse zur Kabelbaummanipulation sowie deren notwendigen Modelle weisen hohe Unsicherheiten auf, die durch das biegeschlaffe Verhalten der Kabelbäume, sowie durch Unsicherheiten in der Auswertung der Sensorik hervorgerufen werden. Um diese zu identifizieren und zu kompensieren, sollen Datensätze zur gezielten Manipulation aufgenommen werden, um anschließend KI-Methoden darauf anzuwenden.
Zielsetzung
Das Projekt teilt sich auf in der Entwicklung einer robusten Positionsschätzung mittels einer Lichtfeldkamera (durch das IIIT), einer modellbasierten Korrespondenzschätzung zwischen Sensordaten und unterliegendem digitalen Bauteilmodell (ISW), einer Parametrierung einer Skill-Abfolge zur Manipulation (IFT) sowie einer über Prozessmodule realisierten Robotersteuerung (IPA). Ziel des Forschungsprojekts ist die Montage eines Kabelbaums anhand eines realen, industriellen Testszenarios, aufgebaut als Demonstrator, dargestellt in Abb. 1.
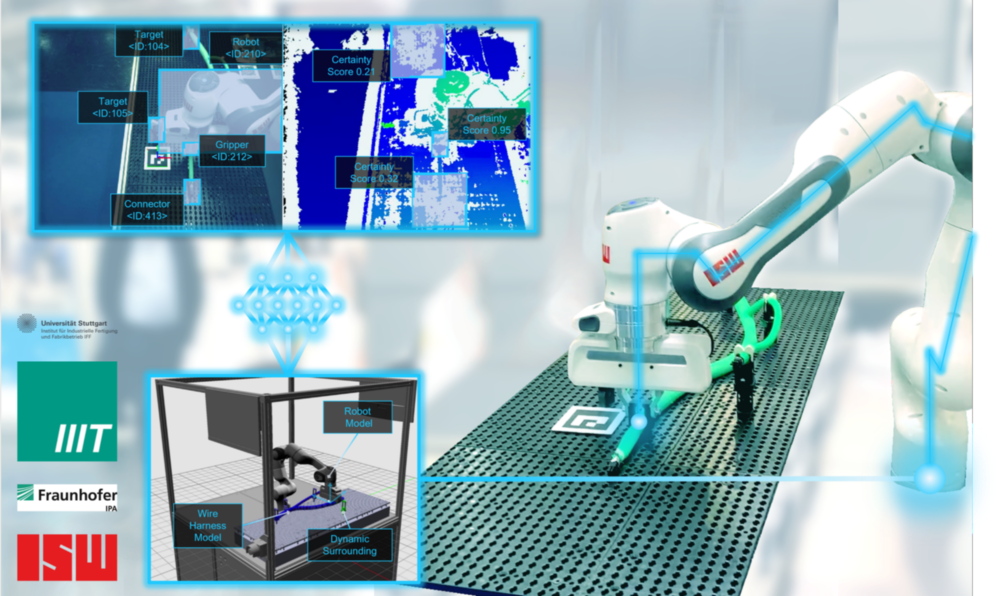
Das Ziel des ISW ist die Reduzierung der Unsicherheiten in der Erfassung und Modellierung biegeschlaffer Bauteile durch die Kombination von Sensordaten, Modellwissen und Erfahrungen in Form von Trainingsdaten. Eindeutige Zustände von digitalen biegeschlaffen Modellen mit hochdimensionalen Sensordaten, z.B. Pixeldaten oder Punktwolken, in Korrespondenz zu setzten und robust auszuwerten, ist hierbei die zentrale Herausforderung.