Projektförderung

Hintergrund
Industrielle Knickarmroboter bieten gegenüber klassischen Werkzeugmaschinen signifikante Vorteile in Bezug auf einen größeren Arbeitsraum, höhere Flexibilität und geringere Anschaffungskosten. Daher werden IR bereits heute für einen weiten Bereich von Aufgaben wie Handhabung, Beschichtungsprozesse, Montagevorgänge bis hin zu Schweiß-, Laser- und Bearbeitungsanwendungen eingesetzt. Der aktuelle Trend geht von diesen Aufgaben, die vor allem durch Punktgenauigkeit und geringe Prozesskräfte charakterisiert werden, hin zu Anwendungen mit höheren Anforderungen an Bahngenauigkeit größeren Prozesskräften. Für diese Aufgaben, wobei vor allem zerspanenden Prozesse im Fokus der Untersuchungen stehen, sind Roboter nach dem Stand der Technik nur begrenzt geeignet.
Problemstellung
Industrieroboter besitzen zwar eine gute Wiederholgenauigkeit, erreichen jedoch ohne zusätzliche Kompensations- und Kalibrierverfahren nur eine schlechte Absolutgenauigkeit. Zusätzlich besitzen Industrieroboter eine vergleichsweise geringe Steifigkeit, die zudem auch stark abhängig von der aktuellen Pose des Roboters ist. Der Einsatz von Robotern für Bearbeitungsaufgaben kann daher derzeit nur Erfolgen, wenn geringe Prozesskräfte auftreten, oder Kompromisse bei der Bearbeitungsgenauigkeit und -qualität eingegangen werden können. Ursache für die fehlende Absolutgenauigkeit und die nachteiligen Dynamikeigenschaften sind im Wesentlichen die zum Einsatz kommenden Getriebe der einzelnen Gelenkachsen. Diese weisen ein nichtlineares Übertragungsverhalten auf, das durch eine Hysteresekurve beschrieben werden kann.
Zielsetzung/Ergebnisse
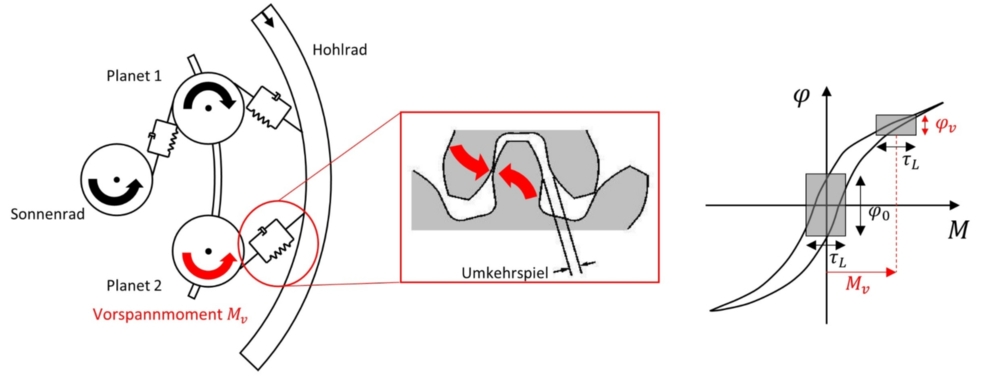
Der Projektpartner, das Institut für Elektrische Energiewandlung der Universität Stuttgart, hat ein Getriebekonzept entwickelt und patentiert, das ein Planetengetriebe mit elektrisch angetriebenen Planetenrädern beinhaltet. Sind die einzelnen Planetenräder separat ansteuerbar, ermöglicht dies eine Verspannung von Planetenrädern gegeneinander, analog zur bei linearen Zahnstange-Ritzel-Antrieben zum Einsatz kommenden Verspannung zur Verbesserung der Steifigkeit und der Umkehrspielkompensation. Die Verspannung bewirkt eine Verschiebung des Arbeitspunkts in der Hysteresekurve. Das Getriebe wird in einem Bereich mit höherer Steifigkeit und geringem Spiel betrieben. Im Rahmen des Forschungsprojekts soll ein Getriebekonzept entwickelt und experimentell validiert werden, welches in Knickarmrobotern eingesetzt deren dynamische Eigenschaften verbessert, und sie so zum Einsatz für Bearbeitungsaufgaben befähigt.