
Projektförderung

Hintergrund
Aufgrund des eingeschränkten Arbeitsraums und der geringen Rekonfigurationsmöglichkeit bei konventionellen seriellen und parallelen Kinematiken wie beispielsweise Industrierobotern oder Gough-Stewart-Plattformen bieten Seilroboter eine sinnvolle Alternative. Seilkinematiken können hierbei flexibel, beispielsweise durch das Versetzen von Seilwinden, und für große Arbeitsräume ausgelegt werden. Transportwege bis zu 100 m und Nutzlasten bis zu mehreren Tonnen sind möglich. Weiterhin können hohe Dynamiken mit Geschwindigkeiten von 10 m/s und Beschleunigungen von 10 g erzeugt werden. Die Bewegung der Plattform eines Seilroboters resultiert aus dem Längen und Kürzen der Seile. Dies wird über das definierte Ab- oder Aufrollen der Seile über Winden erreicht.
Problemstellung
Generell ist die Rotationsfähigkeit von konventionellen Seilkinematiken eingeschränkt. Diese beträgt typischerweise +/- 45° aber maximal 105°, bei spezieller Auslegung. Weiterhin variiert die Rotationsfähigkeit über den translatorischen Arbeitsraum. Bisher kann eine endlose Rotation durch das Aufbringen eines zusätzlichen Aktors auf der Roboterplattform realisiert werden. Es gilt dabei die zusätzliche Masse und die Medienversorgung in der Kinematik und Dynamik dieses Systems zu berücksichtigen. Weiterhin wird das Verhalten des Seilroboters durch eine geringere maximale Nutzlast, eine geringere Dynamik und einen geringeren Arbeitsraum im Vergleich zu einem Seilroboter ohne Rotationsvorrichtung eingeschränkt. Mögliche Kollisionen zwischen Seil, Plattform und Medienversorgung müssen zusätzlich in der Auslegung und Gestaltung eingeplant werden.
Eine endlose Rotation um eine Raumachse ist bei konventionellen Seilrobotern somit nicht oder nur mit hohen Einschränkungen möglich. Hierbei wird besonders für Handhabungs-, Sortier- und Inspektionsaufgaben eine Rotationsfähigkeit von mehr als 105° benötigt, welche unabhängig vom translatorischen Arbeitsraum ist.
Zielsetzung/Ergebnisse
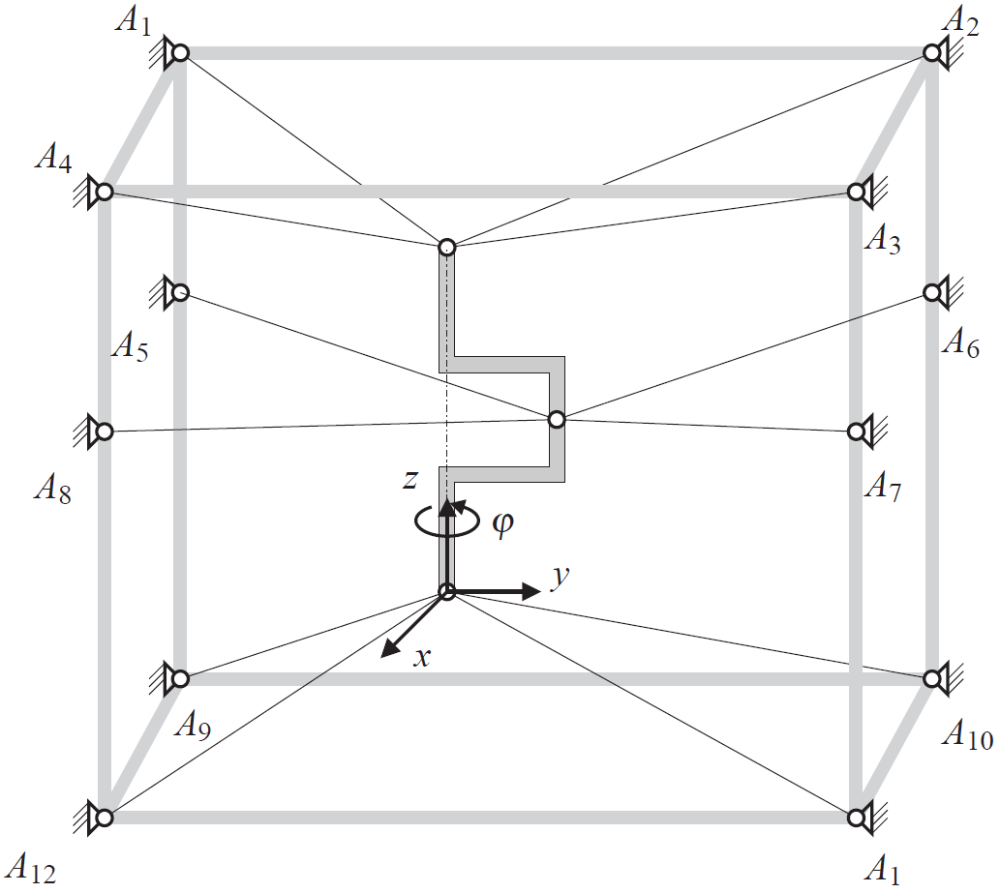
Mit dem im Rahmen des Projekts zu untersuchenden Lösungsprinzip ist eine endlose Rotation ohne eine zusätzliche Vorrichtung auf der Plattform möglich. Es soll dabei eine ausgewählte Seilkinematik modelliert, analysiert und experimentell validiert werden. Ein denkbares Lösungsprinzip ist hierbei eine Kurbelwellengeometrie als Roboterplattform. Der starre Körper als Plattform, von dem bei konventionellen Seilrobotern ausgegangen wird, wird durch eine serielle kinematische Kette ersetzt. Eine endlose Rotation wird durch Relativbewegungen von Teilplattformen ermöglicht. Durch diese Relativbewegung zwischen den Plattformen werden dem System weitere Freiheitsgrade in Form von passiven Gelenken hinzugefügt.
Anhand der Modellierung und Analyse eines speziellen Lösungsprinzips kann auf generelle Beschreibungsmethoden für diese Art von Seilrobotern geschlossen werden. Hierdurch ist es möglich weitere Seilrobotersysteme zur Erzeugung einer endlosen Rotation zu identifizieren und zu beschreiben. Weiterhin soll eine Klassifizierung die identifizierten Systeme untereinander vergleichbar machen. Hierbei kann auf etablierte Entwurfs- und Auslegungskriterien bezüglich Arbeitsraum, Kollision, Arbeitspunkt und Trajektorienverlauf zurückgegriffen werden.
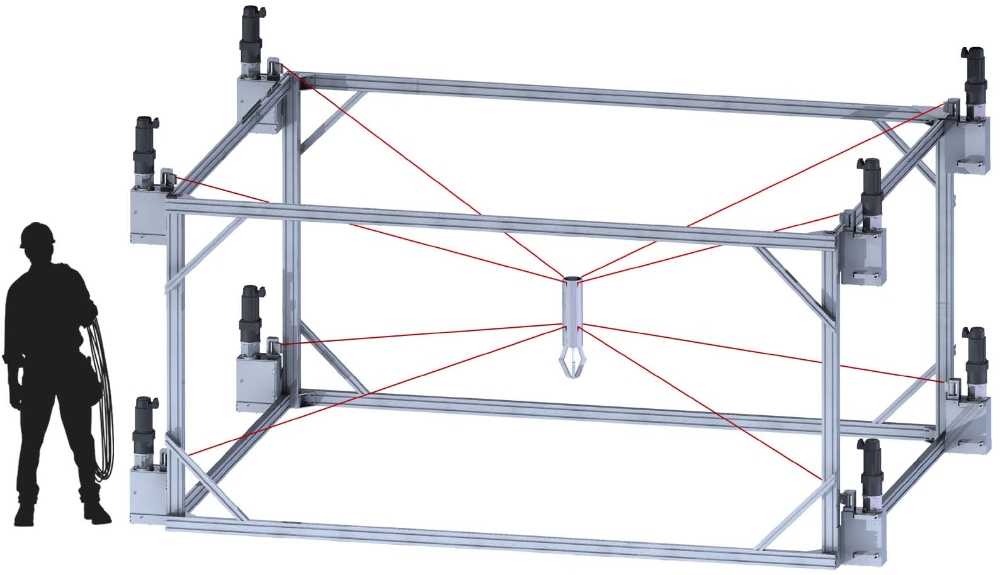
Mit Hilfe der zuvor beschriebenen Kriterien soll ein geeigneter Seilroboterentwurf ausgewählt werden. Neben der Modellbildung und dessen Analyse bildet ein experimenteller Aufbau eine geeignete Möglichkeit den ausgewählten Entwurf unter realen Umgebungsbedingungen zu untersuchen. Hierbei existieren noch keine experimentellen Ergebnisse an Seilrobotern mit endloser Drehachse hinsichtlich Steifigkeit, Genauigkeit und Arbeitsraum. Durch die im Forschungsprojekt durchgeführten Untersuchungen sollen diese fehlenden Kenntnisse generiert und analysiert werden. Des Weiteren sollen die bereits bestehenden Berechnungsalgorithmen für konventionelle Seilkinematiken durch die im Projekt generierten Ergebnisse erweitert werden.

Ihr Ansprechpartner

Thomas Reichenbach
M.Sc.Wissenschaftlicher Mitarbeiter "Mechatronische Systeme und Prozesse"