Projektförderung

Projektpartner
Hintergrund
Klassische Steuerungs- und Regelungskonzepte sind beim Umgang mit weichen Materialien nur bedingt anwendbar. Aufgrund des nichtlinearen Materialverhaltens ergeben sich unendlich viele Freiheitsgrade, welche die automatisierte Handhabung mit Robotern erschweren. Auch die Simulation solcher Systeme erfordert komplexe, rechenaufwendige Modelle.
Im Rahmen der International Research and Training Group Soft Tissue Robotics werden in Kooperation mit anderen Instituten der Universität Stuttgart und der University of Auckland am ISW Möglichkeiten zur Lokalisierung und Simulation von weichen Materialien untersucht. Außerdem werden am ISW Methoden erfasst, um mit Maschinellem Lernen am Digitalen Zwilling direkt ein Mapping von Eingangssignalen auf Steuerungssignale zu erstellen. Beides hat sich bisher auf die Handhabung von weichen Materialien beschränkt und nicht die Bewegung in einer weichen Umgebung betrachtet. Weiche Umgebungen sind beispielsweise in der Chirurgie vorhanden, wo auch vermehrt mit Robotern gearbeitet wird.
Lösungsansatz
Eine Untergruppe des Maschinelles Lernens, Reinforcement Learning, beschreibt ein Vorgehen, bei dem ein Agent durch Trial-und-Error lernt. Der Agent kann im Rahmen eines Aktionsraums handeln und erhält durch die Interaktion mit seiner Umgebung Belohnungen, die er zu maximieren versucht. Dies ist mit einem modellfreien Vorgehen möglich, so dass durch Interaktion mit einer Umgebung gelernt werden kann. Für industrielle oder medizinische Anwendungen sollte nicht am realen System gelernt werden, da während des Lernvorgangs zwangsläufig Fehler auftreten, die gefährlich und kostenintensiv sein können. Im Rahmen der Digitalisierung des Engineerings werden vermehrt Simulationen eingesetzt, die auch hierfür verwendet werden können. Beispielsweise werden für die Virtuelle Inbetriebnahme Hardware-in-the-Loop Simulationen verwendet, bei denen die Steuerung anhand einer virtuellen Maschine oder Anlage getestet wird. Am ISW wird erforscht wie diese Simulationsmodelle als Lernumgebung verwendet werden können. Dies soll auf die Interaktion mit einer weichen Umgebung übertragen werden.

Erwartete Ergebnisse
Es soll eine Simulationsumgebung mit weichen Materialien weiterentwickelt werden, in der sich ein Roboter mittels Maschinellem Lernen zurechtfinden und eine Aufgabe erfüllen kann. Dabei soll eine Interaktion von Materialien unterschiedlicher Steifigkeit berücksichtigt werden. Anhand dieser Simulationsergebung soll die Steuerung von Robotern durch die Definition von Ziel- und Rahmenbedingungen erlernt werden. Dabei soll eine präzise Bewegung eines Roboters in einer weichen Umgebung ermöglicht werden. Die Bewegung soll durch Erfahrungen, die ihm Rahmen mehrerer Simulationsdurchläufe gewonnen werden, automatische optimiert werden.
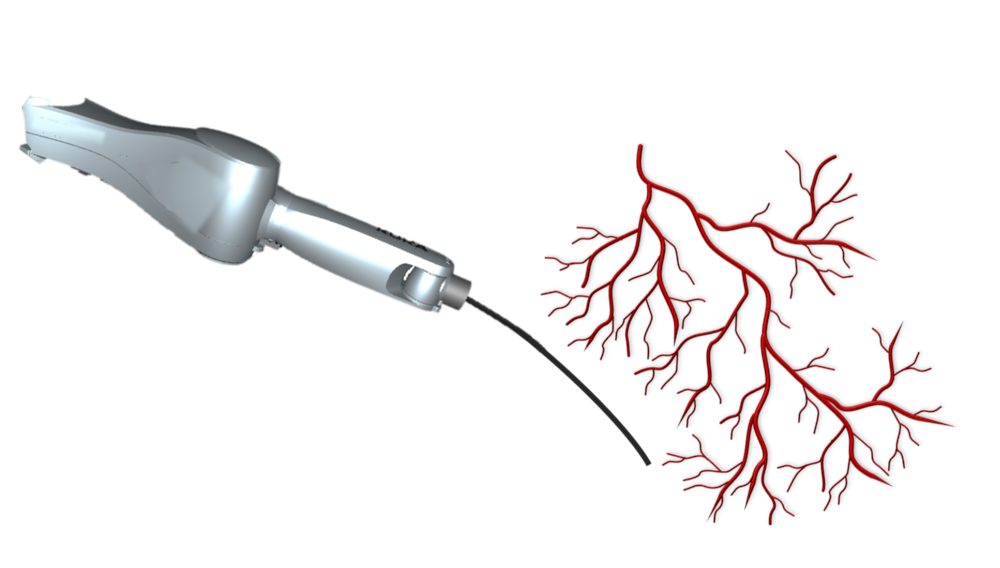
Ein Anwendungsgebiet, in dem weiche Gewebe und Steuerungstechnik zusammenkommen ist die Robotik in der Chirurgie. Als Anwendungsfall soll daher ein Chirurgieroboter betrachtet werden, der die automatisierte Durchführung von Teiloperationen lernt. Dabei muss er sich im weichen Gewebe bewegen und mit diesem interagieren. Beispielsweise kann bei einer Katheteroperationen ein Stent eingesetzt werden. Dabei muss der Katheter häufig von der Leiste über die Blutbahnen bis ans Ziel bewegt werden.
Ihr Ansprechpartner

Annika Kienzlen
M.Sc.Wissenschaftliche Mitarbeiterin "Virtuelle Methoden in der Produktionstechnik"