Projektförderung

Hintergrund
Bei Interaktionen von Robotern mit weichen Materialien stellen sich viele derzeit ungelöste Herausforderungen, wie die Auswahl von Griffstrategien oder Griffpositionen. Weitere Probleme ergeben sich aus dem stark nichtlinearen, nachgiebigen Verhalten von weichen Materialien, welches für die beschädigungsfreie Interaktion berücksichtigt werden muss.
Dieses Thema wird im Rahmen eines internationalen und interdisziplinären Graduiertenkollegs gemeinsam mit der University of Auckland bearbeitet und ist in folgende Bereiche aufgeteilt:
- Modellieren und Entwickeln neuer Simulationstechniken
- Automatisierung, Regelung, Steuerung und Optimierung
- Biologische und technische Konzepte passender Roboterkinematiken
Am ISW liegt der Fokus auf dem Themenbereich B in der Entwicklung einer Cloud-basierten Steuerungsarchitektur. Anwendungsgebiete der Forschungsergebnisse sind beispielsweise in den Bereichen der Lebensmittelverarbeitung, der Chirurgie und der Handhabung von Kabeln zu erwarten.
Problemstellung
Die Handhabung weicher Materialien wird derzeit maunell, mit Sondermaschinen, oder mit starr parametrierten Systemen durchgeführt. Der Wechsel zu gängigen Industrierobotern ist eine günstige und flexible Alternative, erfordert jedoch simulationsbasierte Methoden, mittels derer beispielsweise eine schwingungsminimale Trajektorie geplant, oder modellprädiktiv geregelt werden kann.
Zielsetzung/Ergebnisse
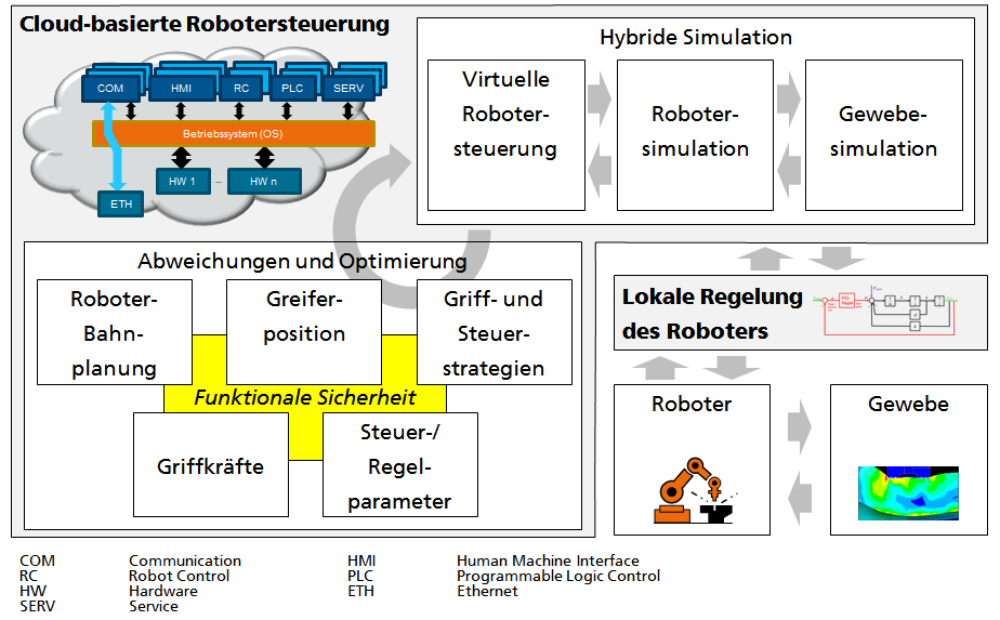
Da Robotersteuerungen nicht über die benötigte Rechenkapazität zur Simulation weicher Materialien verfügen, ist es notwendig, die Steuerungsarchitektur um einen Cloud-basierten Teil zu erweitern, auf den rechenintensive Operationen ausgelagert und einfach skaliert werden können. Die Kommunikation zwischen lokaler Robotersteuerung und Cloud-basierten Diensten stellt einen zentralen Bestandteil des Steuerungskonzepts dar.
Das Hauptziel besteht in der Entwicklung einer Steuerungsplattform, welche die hybride Robotersteuerung erlaubt. Hierbei werden während des Betriebs Parameter wie Griffkräfte, aber auch geplante Trajektorien durch Optimierung und Lernverfahren angepasst. Unterstützt wird die Parametrierung von parallel ablaufenden Simulationen, welche über aktuelle Sensorwerte gestützt werden.
Die effiziente steuerungstechnische Umsetzung liegt dabei im Fokus, ebenso wie die Berücksichtigung von Aspekten der Funktionalen Sicherheit.