Projektförderung

Hintergrund
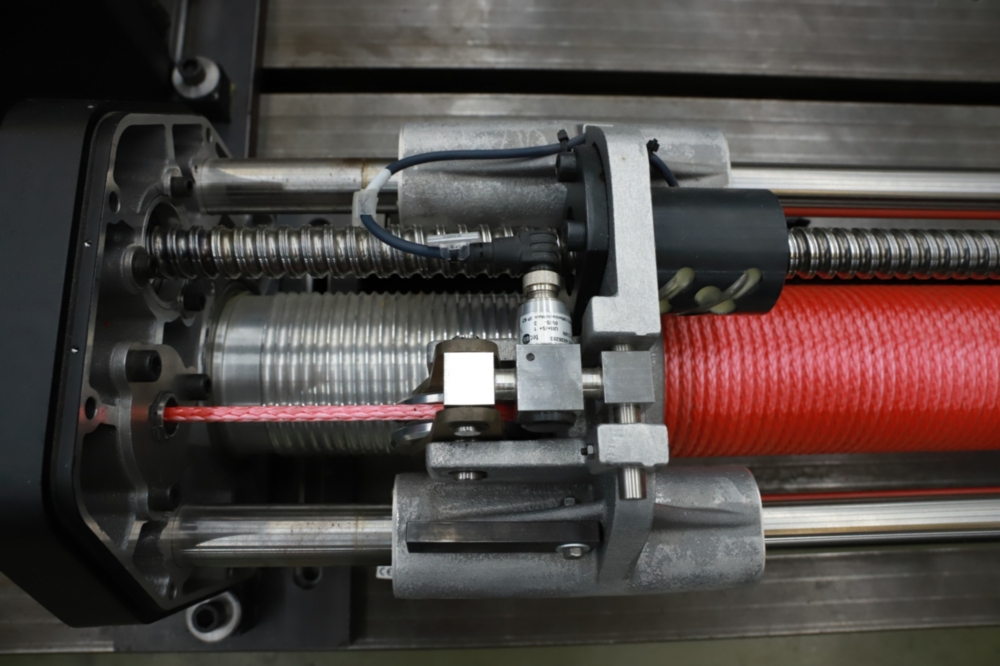
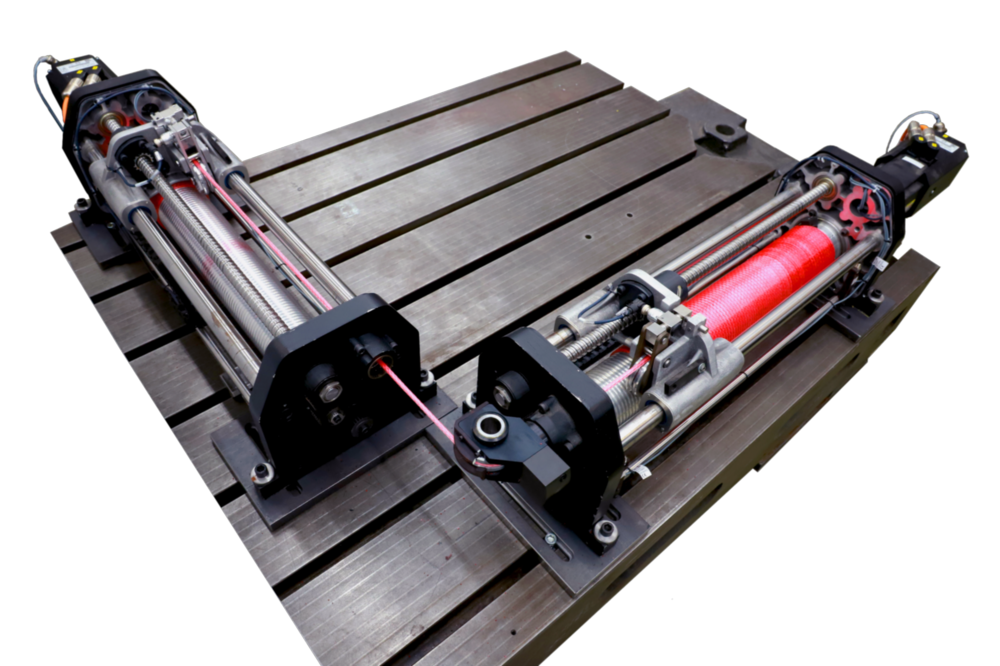
Parallele Seilroboter eignen sich speziell für Anwendungen, die einen großen Arbeitsraum, hochdynamische Bewegungen oder eine hohe Nutzlast erfordern. Aufgrund der geringen Eigenmasse der Kunststofffaserseile und Plattform können Seilroboter als Leichtbauform der Gough-Stewart-Plattform beschrieben werden. Verglichen mit seriellen Robotern besitzen konventionelle parallele Roboter bereits ein hohes Traglast-Eigenmasse-Verhältnis, welches ein paralleler Seilroboter um einige Größenordnungen zugunsten der Traglast verbessert. Die Anforderungen von parallelen Seilrobotern, große Arbeitsräume, hohe Traglasten bei gleichzeitig hohen Geschwindigkeiten, Genauigkeiten und hoher Energieeffizienz zu erzielen, sind gegensätzlich. Aufgrund dieser Gegensätze werden parallele Seilroboter bisher nur in wenigen industriellen Bereichen eingesetzt. Die Manipulation der Seilroboterplattform erfolgt über Seile, die mit Seilaktuierungssystemen angetrieben werden. Dabei beeinflusst das Aktuierungsverhalten maßgeblich die Betriebseigenschaften eines parallelen Seilroboters. Beispielsweise geht aus dem Stand der Forschung hervor, dass Fehler bei der Plattformpositionierung anteilig auf entstandenen Schleppfehler an den Seiltrieben zurückzuführen sind.
Problemstellung
Durch komplexe Zusammenhänge zwischen den mechanischen, elektronischen und thermischen Teilsysteme kommt es bei Seiltrieben, mit der Verwendung von Kunststofffaserseilen als Zugmittel, zu nichtlinearen Betriebseigenschaften. Es entstehen Störeffekte während des Betriebs eines parallelen Seilroboters, welche aktuell nur durch aufwendige Regelverfahren mit entsprechenden Messsystemen am Seiltrieb und der Plattform ausgeglichen werden können.
Zielsetzung/Ergebnisse
Im Rahmen des geplanten Forschungsvorhabens sollen daher die elektromechanischen Eigenschaften von Seiltrieben für parallele Seilroboter mit Kunststofffaserseilen identifiziert werden. Mit den Ergebnissen können daraufhin modellbasierte Regelverfahren entworfen und umgesetzt werden, mit welchen es möglich ist, Störeffekte, ohne zusätzliche Sensorik, zu kompensieren und somit die Genauigkeit, Energieeffizienz und das Geschwindigkeits- und Beschleunigungsvermögen von Seilrobotern zu steigern.

Ihr Ansprechpartner

Thomas Reichenbach
M.Sc.Wissenschaftlicher Mitarbeiter "Mechatronische Systeme und Prozesse"