Projektförderung
Hintergrund
Seilroboter sind eine spezielle Bauform der bekannten parallelen Kinematiken. Besonders daran ist, dass die starren Antriebsglieder (in der Regel Hubzylinder) durch flexible Seile ersetzt wurden. Dies bringt auf der einen Seite Dynamiksteigerung, Verbesserung des Verhältnisses von Nutzlast zu Eigengewicht und eine erhebliche Vergrößerung des Arbeitsraumes mit sich, auf der anderen Seite ergeben sich einige Einschränkungen. So wird zum Beispiel die Forderung an immer positive Seilspannungen eingeführt da Seile nur Zug- aber keine Druckkräfte erzeugen können.
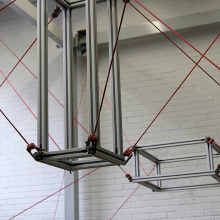
Neben dieser unilateralen Zwangsbedingung ergeben sich auch, je nach Roboterkonfiguration, unterschiedliche Redundanzen. So gibt es zum Beispiel Seilroboter wie in dem Bild oben rechts mit mehr Seilen als Freiheitsgraden, bei denen die Seile gegeneinander verspannt sind (redundantely restrained cable robots). Des Weiteren sind die verwendeten Seile alles andere als starre Körper sondern hoch flexible Elemente. Dadurch erweist sich die Berechnung der Statik und Dynamik von Seilrobotern als schwieriger als die ihrer starren Pendants. Nicht nur führt das nicht-lineare Dehnungsverhalten der Seile zu komplexen Modellen, auch Effekte mit weitaus geringerer Dynamik, wie zum Beispiel Kriechen bzw. Dehnung und andere Alterungseffekte, führen zu Abweichungen zwischen Theorie und Praxis.
Problemstellung
Aufgrund der flexiblen Körper in Seilrobotern sind deren Statik, Kinematik und Dynamik alles andere als einfach und direkt bestimmbar. Die Implikationen von Elastizität, Seilgewicht, Durchhang und Kriechen beeinflussen alle Bereiche der Seilroboter - Kinematik, Steifigkeit, Schwingung und Regelung. Das Hauptziel dieses Projektes solle es dabei sein, wesentliche Effekte, die zur Abweichung von Theorie und Praxis führen, zu identifizieren und charakterisieren.
Darüber hinaus wollen wir ein besseres Verständnis des Seilverhaltens unter hohen dynamischen Bewegungen erforschen. Dies bedeutet nicht nur ein Simulationsmodell herzuleiten, welches sowohl echtzeitfähig ist als auch die Schwingungen der Seile möglichst genau abbilden kann. Dieses Modell soll auch die Interaktion zwischen Seil und Umgebung simulieren können - vor allem im Bereich der Umlenkrollen und den Winden.
Kenntnisgewinn
Dieses Projekt erlaubt bereits eine Dynamiksimulation von Seilrobotern inklusive Seilkinematik und -dynamik und Interaktion zwischen Seil und Umlenkrolle (in Bezug auf den Spannungsverlauf). Aktuelle Forschungsvorhaben konzentrieren sich auf die Integration der transversalen Schwingungsfähigkeit der Seile. Hierbei untersuchen wir die Anwendbarkeit der (nicht-)linearen Balkentheorie, zwei-dimensionalen Wellengleichung und des Ansatzes der modified rigid finite element method. Bisherige Ergebnisse erweisen sich als erfolgsversprechend - vor allem in Bezug auf die rigid finite element method.
Die Integration in ein vollständiges Simulationsmodell eines sechs-dimensionalen Seilroboters mit acht Seilen sowie die experimentelle Validierung stehen noch aus.

Relevante Publikationen
2018
- Tempel, P., Schmidt, A., Haasdonk, B., & Pott, A. (2018). Application of the Rigid Finite Element Method to the Simulation of Cable-Driven Parallel Robots. In S. Zeghloul, L. Romdhane, & M. A. Laribi (Eds.), Computational Kinematics: Proceedings of the 7th International Workshop on Computational Kinematics that was held at Futuroscope-Poitiers, France, in May 2017: Vol. Mechanisms and Machine Science (No. 50; pp. 198–205). Springer International Publishing. https://doi.org/10.1007/978-3-319-60867-9_23
2017
- Tempel, P., Herve, P.-E., Tempier, O., Gouttefarde, M., & Pott, A. (2017, May). Estimating inertial parameters of suspended cable-driven parallel robots — Use case on CoGiRo. 2017 IEEE International Conference on Robotics and Automation (ICRA). https://doi.org/10.1109/icra.2017.7989723
- Tempel, P., & Pott, A. (2017). Expo 2015 - A SimTech Success Story.
2016
- Tempel, P., & Pott, A. (2016, November). Cable-Driven Parallel Robots: Expo 2015 - Forth and Back Again.
- Tempel, P., & Pott, A. (2016). Parallele Seilroboter in Theorie und Praxis: Leichtbau, Energieeffizienz und Hohe Dynamiken als Potential, Elastizität als Hauptherausforderung (No. 9). Wt Werkstatttechnik Online; Springer VDI-Verlag GmbH & Co. KG. http://www.werkstattstechnik.de/wt/article.php?dataarticle_id=86418
- Tempel, P., & Pott, A. (2016, November). SimTech Status Seminar 2016 - Status Update: Improved Modeling of Cables for Kinematics and Dynamics of Light-weight Robots.
- Tempel, P., Verl, A., & Pott, A. (2016). On the Dynamics and Emergency Stop Behavior of Cable-Driven Parallel Robots. In V. Parenti-Castelli & W. Schiehlen (Eds.), ROMANSY 21 - Robot Design, Dynamics and Control (Vol. 569, pp. 431–438). Springer Verlag and Springer International Publishing. https://doi.org/10.1007/978-3-319-33714-2_48
2015
- Tempel, P., Miermeister, P., & Pott, A. (2015). Kinematics and Dynamics Modeling for Real-Time Simulation of the Cable-Driven Parallel Robot IPAnema 3. Proceedings of the 14th IFToMM World Congress, Article 14th–2. https://doi.org/10.6567/IFToMM.14TH.WC.OS4.020
- Tempel, P., Miermeister, P., Lechler, A., & Pott, A. (2015). Modelling of Kinematics and Dynamics of the IPAnema 3 Cable Robot for Simulative Analysis. Amm, 794, 419–426. https://doi.org/10.4028/www.scientific.net/amm.794.419
- Tempel, P. (2015). SimTech Milestone Report: Improved Modeling of Cables for Kinematics and Dynamics of Cable-driven Parallel Robots.
- Tempel, P., Schnelle, F., Pott, A., & Eberhard, P. (2015). Design and Programming for Cable-Driven Parallel Robots in the German Pavilion at the EXPO 2015. Machines, 3, Article 3. https://doi.org/10.3390/machines3030223
- Tempel, P. (2015, November). SimTech Status Seminar 2015 - Status Update: Improved Modeling of Cables for Kinematics and Dynamics of Light-weight Robots.
2014
- Tempel, P. (2014, December). SimTech Status Seminar 2014 - Status Update: Improved Modeling of Cables for Kinematics and Dynamics of Light-weight Robots.
- Tempel, P. (2014). Cable-Driven Parallel Robots - An Innovative Technology for Manufacturing Industry and Entertainment. ––.
Ihr Ansprechpartner

Thomas Reichenbach
M.Sc.Wissenschaftlicher Mitarbeiter "Mechatronische Systeme und Prozesse"