Projektförderung
Hintergrund
Klassischerweise haben sich Großunternehmen und Konzerne der Holzverarbeitung vorwiegend auf die kostengünstige Massenfertigung von einheitlichen Produkten spezialisiert, sodass KMU den Markt der individualisierten Produkte mit geringen Losgrößen bedienten. Aktuelle Trends wie wachsende Produktindividualität und –dynamik führen dazu, dass auch Großunternehmen zunehmend diesen Markt erschließen und damit zur direkten Konkurrenz der KMU werden.
Problemstellung
Um konkurrenzfähig zu bleiben, müssen KMU dem zunehmenden Wettbewerb mit einer höheren Produktivität begegnen. Dies lässt sich durch eine Steigerung des Automatisierungsgrads erreichen. Um dem Kunden möglichst viele Freiheitsgrade bereitstellen zu können, müssen bislang viele Bearbeitungsschritte manuell ausgeführt werden – die Komplexität der Prozesskette steigt. In der Holzbearbeitung werden dafür häufig teure Sondermaschinen benötigt, die häufig viel Platz und Energie benötigen (z.B. Abrichthobelmaschine, Band- und Kreissägen, Kantenanleimgerät, etc.). Der Einsatz von Industrierobotern (IR) erweist sich daher als zunehmend wirtschaftliche Alternative für den Aufbau flexibler Fertigungseinheiten. Zur Handhabung von Werkstücken und zur Fräsbearbeitung mit IR stehen bereits zahlreiche Planungswerkzeuge zur Verfügung. Der wirtschaftliche Einsatz solcher Lösungen ist jedoch eng mit dem Vorhandensein spezialisierter Fachkräfte verknüpft. Darüber hinaus sind beispielsweise bestehende CAD/CAM-Systeme nicht auf typische Bearbeitungswerkzeuge der Holzwerkstoffbearbeitung ausgelegt. Der daraus resultierende große Personal- und Programmieraufwand stellt eine Einstiegshürde dar, die gerade für KMU deutlich zu hoch ist, um flexible Bearbeitungslösungen mit IR wirtschaftlich einzusetzen.
Zielsetzung/Ergebnisse
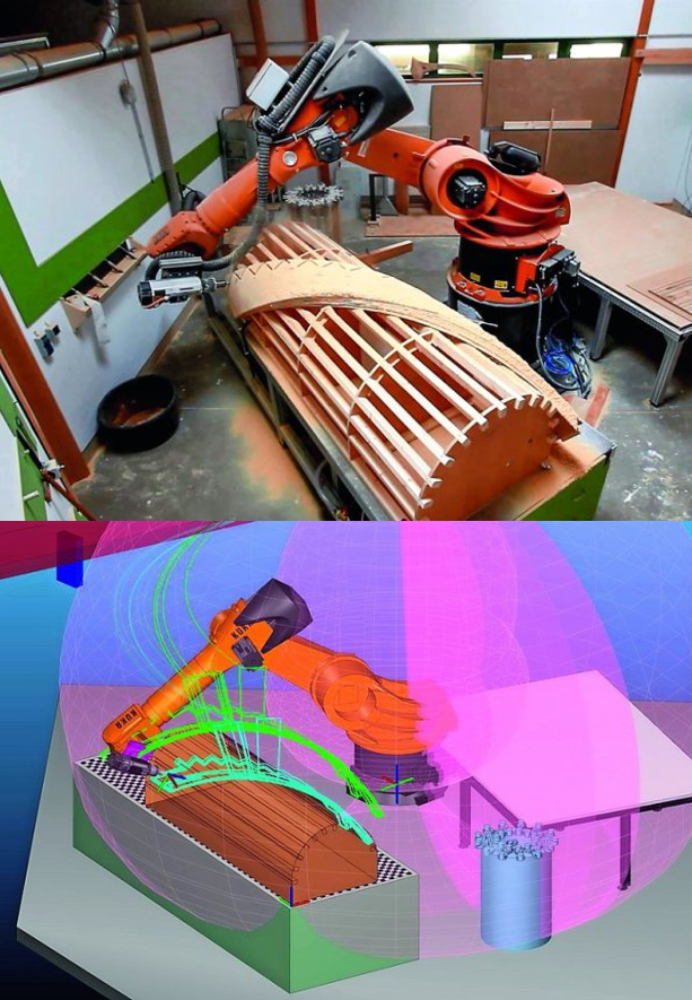
Aus diesen Gründen soll im Rahmen dieses Projektes eine signifikante Reduktion der Komplexität zur Programmierung von flexiblen, roboterbasierten Fertigungseinrichtungen realisiert werden. Durch die gezielte Verbesserung und Erweiterung der Softwaresysteme sowie die Möglichkeit, Expertenwissen digital entlang der gesamten Prozesskette zur Verfügung zu stellen, soll die Hemmschwelle für den IR-Einsatz in KMU verringert werden. Neben Steigerung von Flexibilität und Produktivität kann der Einsatz von IR auch wesentlich zur Belastungsreduzierung des Personals (z.B. Staub, Lärm, Vibrationen, etc.) und somit zur Verbesserung der Arbeitsplatzqualität beitragen. Am ISW sollen Lösungen zur Steigerung des Automatisierungsgrades entlang der gesamten Prozesskette entwickelt werden. Mit Hilfe von Virtual Reality (VR) und Augmented Reality (AR) soll dem Bediener die grafische und intuitive Programmierung von Robotersystemen ermöglicht werden. Auf diese Weise wird das Vertrauen in die Systeme erhöht und der Einsatz von IR in KMU motiviert. Damit das Personal nicht speziell auf Robotersysteme geschult werden muss, soll die Umsetzung der Bearbeitungsschritte automatisiert erfolgen. Ebenfalls im Fokus des ISW liegt die Entwicklung und Integration eines adaptiven Aufspannsystems für typische Werkstücke in der Holzbearbeitung. Die prozesssichere Fixierung individueller Werkstückgeometrien mit Freiformflächen sowie der Werkstückwechsel, in möglichst kurzer Zeit, sollen so ermöglicht werden.