
Eigenentwicklung

Hintergrund
Die Umsetzung innovativer Ansätze in der Steuerungs- und Regelungstechnik scheitert oft an der mangelnden Offenheit und der begrenzten Performance, insbesondere bei komplexen Algorithmen, wie beispielsweise bei modellbasierten Ansätzen. Rekonfigurierbare Hardware, insbesondere FPGAs, bieten dank Hardware-Performance, kombiniert mit der Flexibilität von Software, eine leistungsfähige Plattform.
Um diese neue Technologie effizient nutzen zu können, wurde in verschiedenen Forschungsarbeiten die Offene Antriebsreglerplattform am ISW entwickelt. Es zeigte sich, dass das Potential der Technologie nicht auf die Antriebstechnik beschränkt ist, sondern auch für andere Bereiche wie Prozessregelung, Kommunikationstechnik und Integration neuartiger Sensoren geeignet ist. Um die Entwicklungen zu vereinheitlichen und Synergieeffekte zu maximieren, wurden alle bisherigen Entwicklungen unter dem Namen Open Automation Platform (OAP) fusioniert.
Zielsetzung/Ergebnisse
Die Architektur ermöglicht eine einheitliche Anbindung des Systems auf Kommunikationsschnittstellen. Einerseits für spezialisierte Inbetriebnahme- und Forschungswerkzeuge, andererseits ist auch eine Anbindung an verschiedene Feldbusse möglich. Hier kommt ein weiterer Vorteil zum Tragen, da der Wechsel von einem Feldbus zu einem anderen keinen Tausch der Hardware mehr erfordert, sondern durch eine Änderung des FPGA-Designs erreicht werden kann
Die OAP bietet Offenheit auf den folgenden drei Ebenen.
Hardware
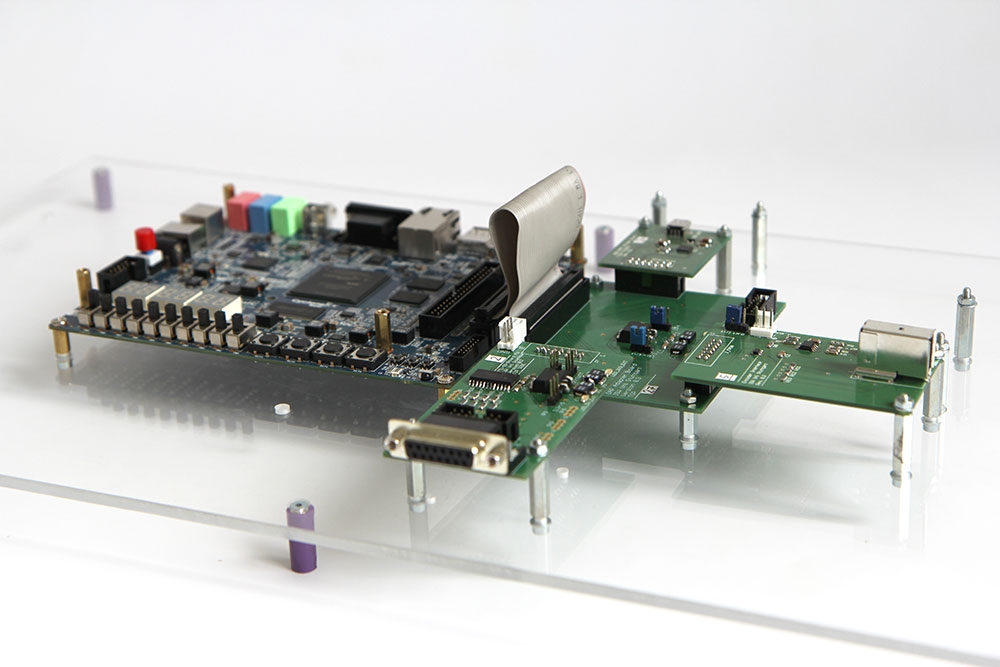
Auf unterster Ebene stehen eine Vielzahl von Schnittstellen zur Verfügung, welche modular und anwendungsspezifisch kombiniert werden können. Dies sind beispielsweise Treiber, Encoder-Schnittstellen, Leistungstreiber, Kommunikationsmodule etc. Der FPGA selbst ist über eine einheitliche Schnittstelle mit den Interfaces gekoppelt. Für die meis-ten Anwendungen kommen handelsübliche FPGA-Prototyping-Boards zum Einsatz, wodurch von der sich schnell entwickelnden FPGA-Technologie profitiert wird.
FPGA
Auch die FPGA-Ebene ist modular strukturiert. Dabei wird die Methodik des System-On-a-Programmable-Chip (SOPC) genutzt. Diese ermöglicht ein effizientes Systemdesign, basierend auf individualisierten, sowie Standardkomponenten. Eine stetig wachsende Sammlung an Komponenten steht bereits zur Verfügung, beispielsweise für Interfaces wie Encoder oder verschiedene Feldbusse sowie zur Umsetzung von Reglern und Modellen.
Software
Als Plattform für die Software können gegenwärtig zwei Optionen genutzt werden: Entweder kommt ein sogenannter Soft-Prozessor zum Einsatz, welcher aus FPGA-Ressourcen synthetisiert wird. Alternativ wird Software auf einem Hard- Prozessor ausgeführt, welcher fester Bestandteil des ICs ist (z. B. ein ARM-Prozessor). Abhängig von der Anwendung kann entweder eine spezielle Firmware oder ein Betriebssystem zum Einsatz kommen. Die Software ist ebenfalls modular aufgebaut, wozu objektorientierte Konzepte genutzt werden.
Ihre Ansprechpartner

Florian Frick
Dipl.-Ing.Oberingenieur, Gruppenleiter „Echtzeitkommunikation und Steuerungshardware“

Wolfgang Bubeck
M.Sc.Wissenschaftlicher Mitarbeiter "Echtzeitkommunikation und Steuerungshardware"

Manuel Weiss
M.Sc.Wissenschaftlicher Mitarbeiter "Echtzeitkommunikation und Steuerungshardware"