Projektförderung


Hintergrund
Simulation dynamischer und kinematischer Prozesse: Virtuelle 3D-Testumgebungen von realen Fertigungseinrichtungen haben sich in vielen Bereichen der Produktionsautomatisierung bereits erfolgreich durchgesetzt. Die Simulationsexperimente werden dabei in Echtzeit, Überechtzeit oder auch langsamer als Echtzeit (Unterechtzeit) ausgeführt. Das Ziel bei der Verwendung von virtuellen 3D-Testumgebungen besteht darin, noch bevor die reale Anlage verfügbar ist, einen Nachweis der Leistungsfähigkeit, eine Inbetriebnahme der realen Steuerungstechnik sowie Tests der Steuerungsprogramme ohne reale Steuerungstechnik durchzuführen. Dies ist von besonderem Nutzen, wenn sich die Bedingungen der Anlage im Betrieb ändern, so dass eine große Anzahl von Tests notwendig ist, um etwa die Taktzeit abzuschätzen oder um ausreichend große Teile der möglichen Systemzustände zu überprüfen.
Problemstellung
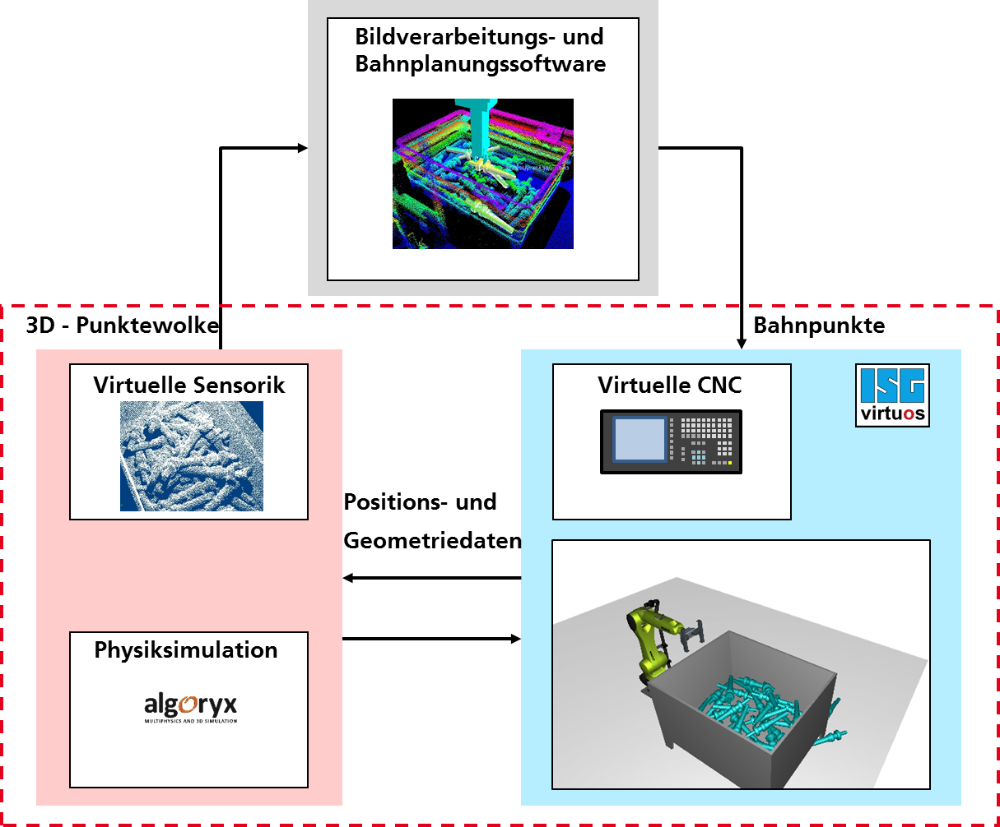
Der sogenannte Griff-in-die-Kiste, also die automatisierte Handhabung von ungeordneten Stückgütern, beschäftigt die Automatisierungstechnik schon seit gut zwei Jahrzehnten und gilt als wichtiger Baustein flexibler Fertigungsprozesse. Zur automatischen Bestimmung von Greifpunkten existieren insbesondere in der Robotik einige Ansätze, die ohne eine Korrektur oder Entscheidung durch den Menschen arbeiten. Die Grundlagen der Simulation von Sensordaten wurde bereits behandelt, allerdings ohne die Anbindung an eine Simulation der Handhabungseinrichtung oder eines Materialflusssystems. Eine virtuelle 3D-Testumgebung wird bislang vor allem für die Beschreibung des kinematischen und dynamischen Verhaltens von Maschinen und Robotern verwendet. Im Bereich der 3-D-Bildverarbeitung werden Simulationen z.B. zum Test einer Sensoranordnung oder der Performance von Algorithmen bisher kaum eingesetzt.
Zielsetzung/Ergebnisse
Handhabungsvorgänge sind bei der Beschickung von Produktionsmaschinen unverzichtbar, lassen sich jedoch aufgrund der hohen Kosten für werkstückspezifische Vorrichtungen nur selten flexibel automatisieren. In diesem Projekt soll daher eine Simulation untersucht und bewertet werden, die das Verhalten von chaotisch gelagerten Stückgütern in Behältern beschreibt. Dazu sollen verschiedene Modellierungsansätze der physikalischen und der Sensor-Simulation verglichen und bewertet werden.