Projektförderung

Hintergrund
Die simulationsgestützte Inbetriebnahme von Automatisierungslösungen erhält mit der Methode der Virtuellen Inbetriebnahme Einzug in das Engineering des Maschinen- und Anlagenbaus. In der späten Engineering-Phase kann durch den Einsatz des Digitalen Zwillings der Automatisierungslösung die Steuerungstechnik bereits vorab ohne reale Anlagentechnik in Betrieb genommen werden. Eine darüber hinaus von Beginn an durchgängige simulationsbasierte Planung und Auslegung ist vielversprechend, derzeit aber aufgrund fehlender Lösungskonzepte nicht möglich. Im Speziellen bei vollautomatisierten Montagelinien mittlerer Losgröße und erhöhten Flexibilitätsanforderungen ist der Einsatz einer virtuellen Umgebung angereichert um abgestimmte Automatismen zur schnellen und wirtschaftlichen Planung, Auslegung und Inbetriebnahme und aufgrund des geringeren Engineering-Aufwands im Vergleich zu bestehenden Lösungen vielversprechend.
Problemstellung
Trotz des technologischen Fortschritts und der Digitalisierung der Fertigungsprozesse sind die Montagelinien noch weit von den Ideen der vierten industriellen Revolution entfernt. Viele Arbeitsschritte werden noch immer von Menschenhand ausgeführt, da die menschliche Intuition immer noch komplexe Montageaufgaben besser löst als Roboteranlagen, dennoch der Personalaufwand für die Montage kann zwischen 50% und 75% der gesamten Fertigungskosten betragen. Bei der Montage von Serienprodukten ist der Automatisierungsgrad stark von der Losgröße abhängig. Während bei kleineren Losgrößen die Montage meist von Hand erfolgt, ist bei sehr großen Losgrößen die Montage weitestgehend automatisiert. Sehr hoher Aufwand für die Planung, Auslegung und Inbetriebnahme automatisierter Montagelinien erst bei großen Losgrößen wirtschaftlich. Bei der Montage von Serienprodukten ist der Automatisierungsgrad stark von der Losgröße abhängig. Während bei kleineren Losgrößen die Montage meist von Hand erfolgt, ist bei sehr großen Losgrößen die Montage weitestgehend automatisiert. Dies begründet sich darin, dass der sehr hohe Aufwand für die Planung, Auslegung und Inbetriebnahme automatisierter Montagelinien erst bei großen Losgrößen wirtschaftlich ist. Bei mittleren Losgrößen besteht das Problem, dass aufgrund von Kapazitäts- und Kostengründen weder eine manuelle Montage und aufgrund des großen Engineering-Aufwands noch eine automatisierte Montagelinie in Frage kommt. Hersteller von Automatisierungslösungen stehen daher vor der Herausforderung, bei mittleren Losgrößen und erhöhten Flexibilitätsanforderungen wirtschaftliche Lösungen anbieten zu können.
Zielsetzung/Ergebnisse
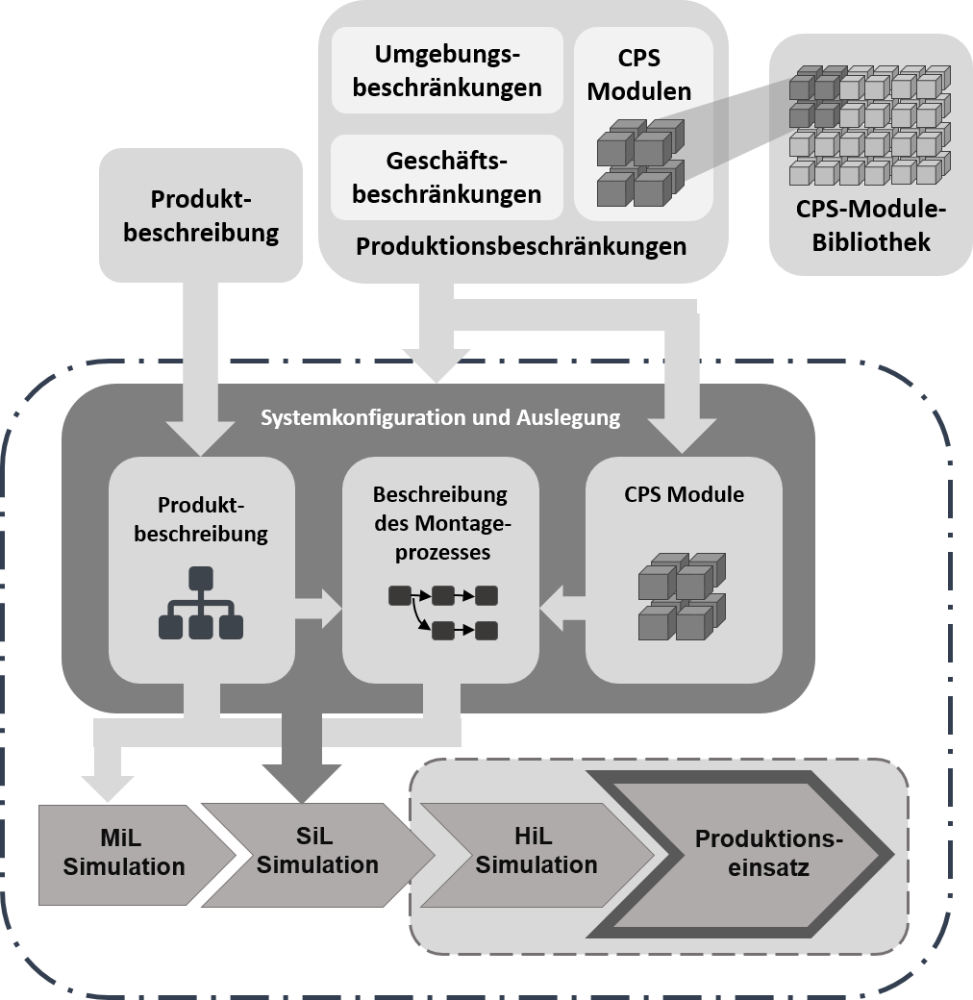
Ziel der Arbeit ist die Entwicklung eines Systems für Automatisiertes Engineering vollautomatisierter Montagelinien durch Einsatz des Digitalen Zwillings, durch Komplexitätsreduzierung bei der Montageplanung und durch folgende lokale und globale Lösung zur Optimierung der Montageplanung unter Systembedingungen: Vollautomatisierung der bestehenden Montagelinie für die neuen Produktanforderungen und Ermittlung der Systemkonfiguration für eine neue Produktionslinie mit Produktionseinschränkungen (Produktionskosten, Platzbedarf usw.). Um den Aufwand für die Erstellung einer automatisierten Montagelinie bei mittlerer Losgröße deutlich zu senken, sollen Lösungskonzepte für folgende Bereiche des automatisierten Engineerings durch Einsatz des Digitalen Zwillings entwickelt werden:
- CPS-Baukasten für Robotersysteme, Roboterkomponenten, Greifer- und Schraubsysteme, Montagetische, Teilemagazine, etc.
- Automatische Identifikation der an die Steuerung angeschlossenen (aktiven und passiven) mechatronischen Komponenten
- Automatisches Identifizieren der Verwendungsmöglichkeiten der erkannten Automatisierungskomponenten
- Weitgehend automatisiertes Analysieren von Baugruppen-CAD-Daten auf Montagefähigkeit und Erstellung einer abstrakten Montagevorschrift
- Abbilden der abstrakten Montagevorschrift auf die vorhandenen Automatisierungskomponenten
- Vollständige Offline-Inbetriebnahme der Montage mit Hilfe des Digitalen Zwillings der Automatisierungslösung
- Integration geeigneter Sensorik zur Roboter-Kalibrierung zur Unterstützung beim Übergang von der virtuellen in die reale Montagelinie