Projektförderung

Hintergrund
Bei Interaktionen von Robotern mit weichen Materialien zeigen sich viele derzeit ungelöste Herausforderungen, wie die Auswahl von Griffstrategien oder Griffpositionen. Weitere Probleme ergeben sich aus dem stark nichtlinearen, nachgiebigen Verhalten von weichen Materialien, welches für die beschädigungsfreie Interaktion berücksichtigt werden muss.
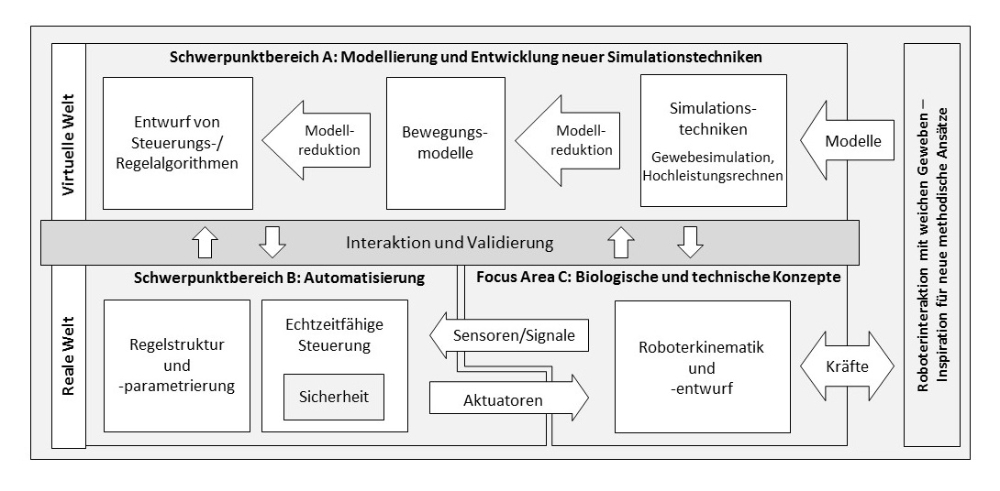
Dieses Thema wird im Rahmen eines internationalen und interdisziplinären Graduiertenkollegs gemeinsam mit der University of Auckland bearbeitet und ist in folgende Bereiche aufgeteilt:
- Modellieren und Entwickeln neuer Simulationstechniken
- Automatisierung, Regelung, Steuerung und Optimierung
- Biologische und technische Konzepte passender Roboterkinematiken
Das ISW bringt seine Kernkompetenzen im Rahmen der Themenbereichen B und C in das Forschungsprojekt ein. Dies beinhaltet die Entwicklung einer Cloud-basierten Steuerungsarchitektur als auch die modellbasierte Identifikation der Kinematik von weichen Geweben in Verbindung mit dem Entwurf von Lokalisierungsalgorithmen und Handhabungsstrategien. Anwendungsgebiete der Forschungsergebnisse sind unter anderem in den Bereichen der Lebensmittelverarbeitung, der Chirurgie oder der industriellen Produktion, beispielsweise bei der Handhabung von Kabeln zu erwarten.

Problemstellung
Roboter zeichnen sich im heutigen Produktionsumfeld insbesondere dadurch aus, gleichförmige und gleichgerichtete Arbeitsabläufe präzise und zuverlässig auszuführen. Dabei überbieten sie den Menschen hinsichtlich Genauigkeit und Ausdauer. Allerdings mangelt es Ihnen an der Fähigkeit sich auf unvorhergesehene Änderungen von Prozessparametern einzustellen.
Bei Handhabungsaufgaben von weichen Materialien treten derartige Störgrößeneinflüsse jedoch massiv in den Vordergrund. Die Objekte variieren in ihren Merkmalen, wie der geometrischen Form, ihrem kinematischen und dynamischen Verhalten, abhängig davon in welcher Konfiguration und Lage sie sich gerade befinden. Somit sind Aufgabenstellungen, die von einem Menschen intuitiv gelöst werden, wie das Erkennen eines verformten Objektes und das Ableiten einer geeigneten Griffstrategie, eine enorme Herausforderung für die Robotersteuerung.
Zielsetzung/Ergebnisse
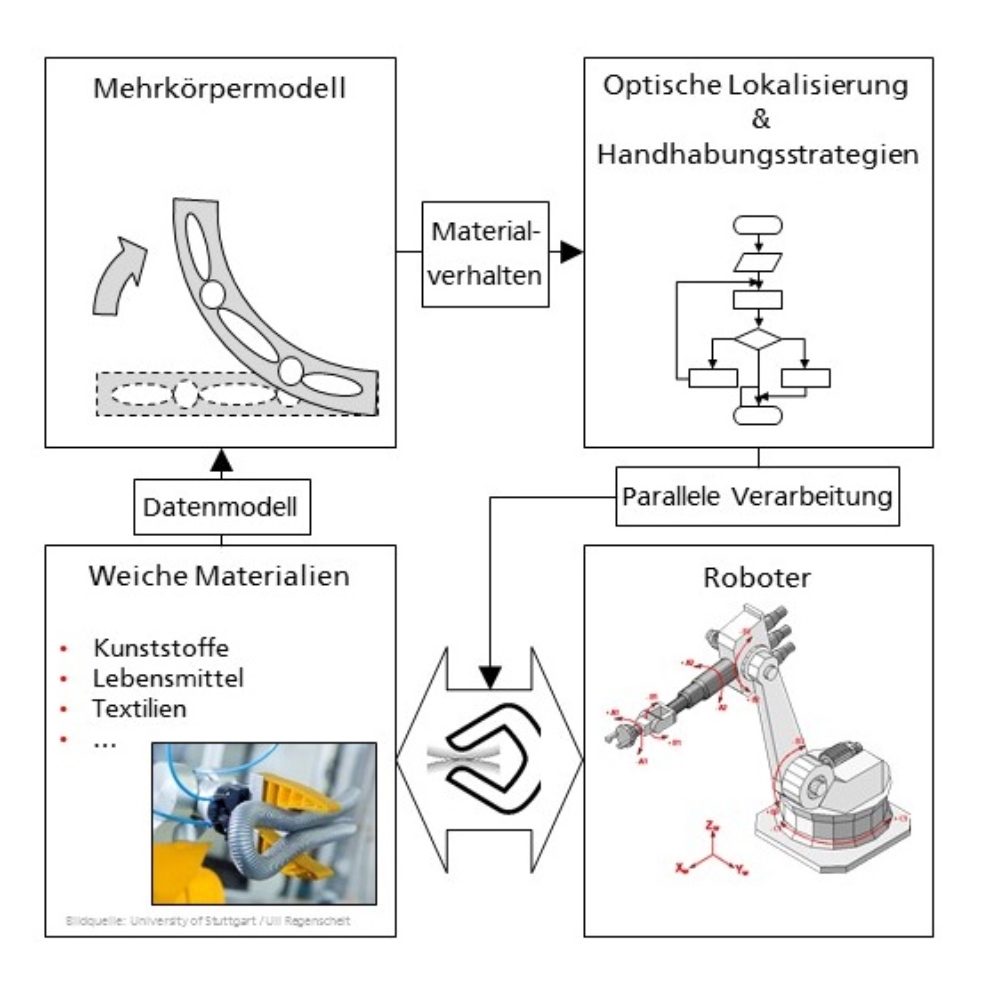
Mit Hilfe modellbasierter Ansätze sollen Lokalisierungs- und Handhabungsstrategien für weiche, biegeschlaffe und formlabile Objekte entwickelt werden. Dafür soll das makroskopische Verhalten sowie die Dynamik des zu handhabenden Körpers über ein vereinfachtes Modell beschrieben werden. Hier stehen Beschreibungsansätze mit Methoden der Mehrkörpersimulation im Mittelpunkt der Betrachtungen.
Anhand der entwickelten Modelle kann dementsprechend das Materialverhalten des Objektes hinsichtlich möglicher Deformationen und Konfigurationen abgeschätzt werden. Dies birgt das Potential bereits bestehende Ansätze zur optischen Lokalisierung von Festkörpern auf die Erkennung von weichen und formlabilen Objekten zu erweitern. Weiterhin erlaubt das Materialmodell die Berücksichtigung des Materialverhaltens bei der Trajektorienplanung und der Auswahl von Griffpositionen, wodurch geeignete Handhabungsstrategien entworfen werden können.