Project funding

Background
Industrial robots offer significant advantages over machine tools in terms of a larger work space, greater flexibility and lower acquisition costs. Therefore, IR are already used for a wide range of tasks such as handling, coating processes, assembly operations, welding, laser and machining applications. The current trend is to move from these tasks, which are characterized primarily by point accuracy and low process forces, to applications with higher requirements for path accuracy and higher process forces. For these tasks, with a focus of the investigations is primarily on machining processes, robots are only suitable to a limited extent according to the state of the art.
Problem statement
Although industrial robots have good repeatability, they achieve only poor absolute accuracy without additional compensation and calibration procedures. In addition, industrial robots have a comparatively low stiffness, which is also strongly dependent on the current pose of the robot. The use of robots for machining tasks is therefore currently only possible, if low process forces occur, or if compromises can be made in terms of machining accuracy and quality. The main reason for the lack of absolute accuracy and the disadvantageous dynamic properties are the gears used for the individual joints. These exhibit nonlinear transmission behavior, which can be described by a hysteresis curve.
Goals
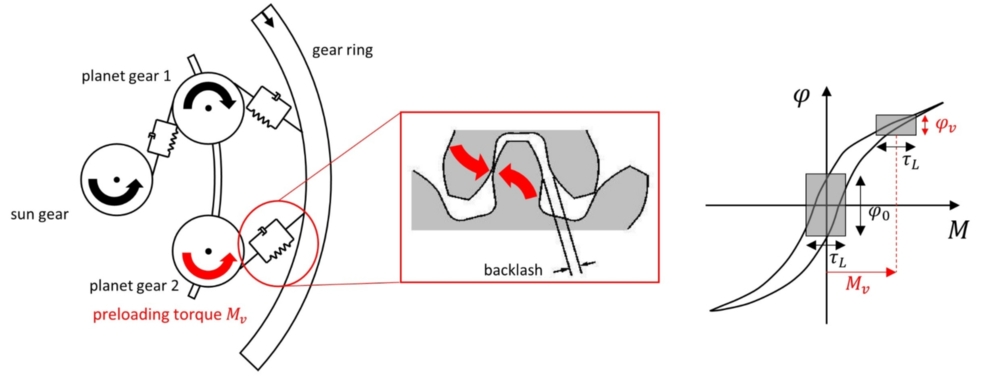
The project partner, the Institute for Electrical Energy Conversion at the University of Stuttgart, has developed and patented a gear concept that incorporates a gear with electrically driven planetary gears. If the individual planetary gears are separately controllable, the gears can be preloaded, analogous to the preloading used in linear rack-and-pinion drives to improve stiffness and backlash compensation. The preloading causes a shift of the operating point in the hysteresis curve. The gearbox is operated in a range with higher stiffness and low backlash. Within the scope of the research project, a gear concept is to be developed and experimentally validated which. When used in industrial robots, this should improves their dynamic properties, thus enabling them to be used for machining tasks.