Project funding

Background
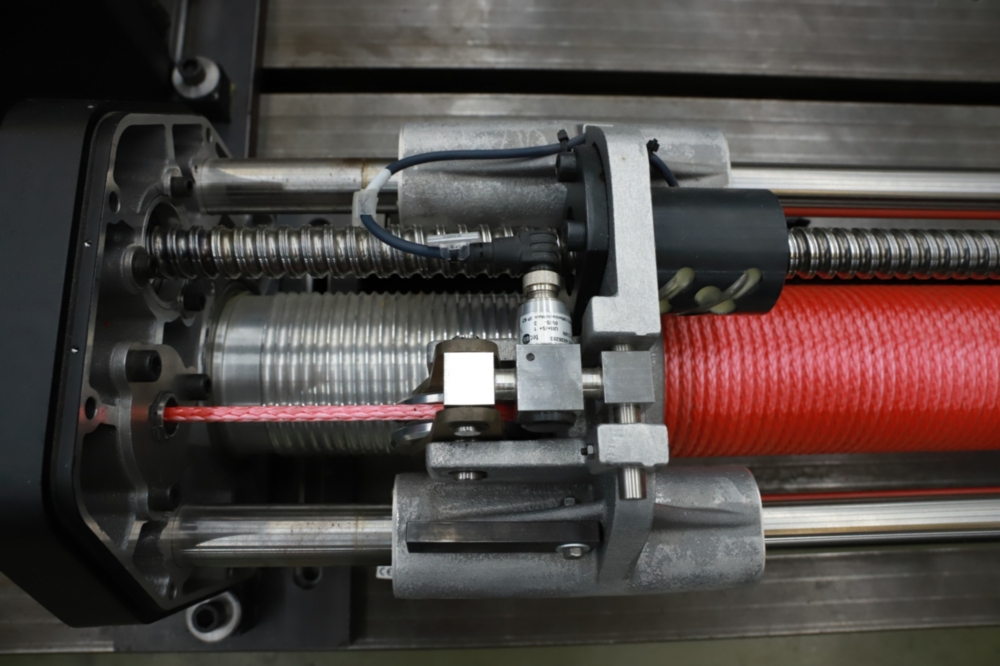
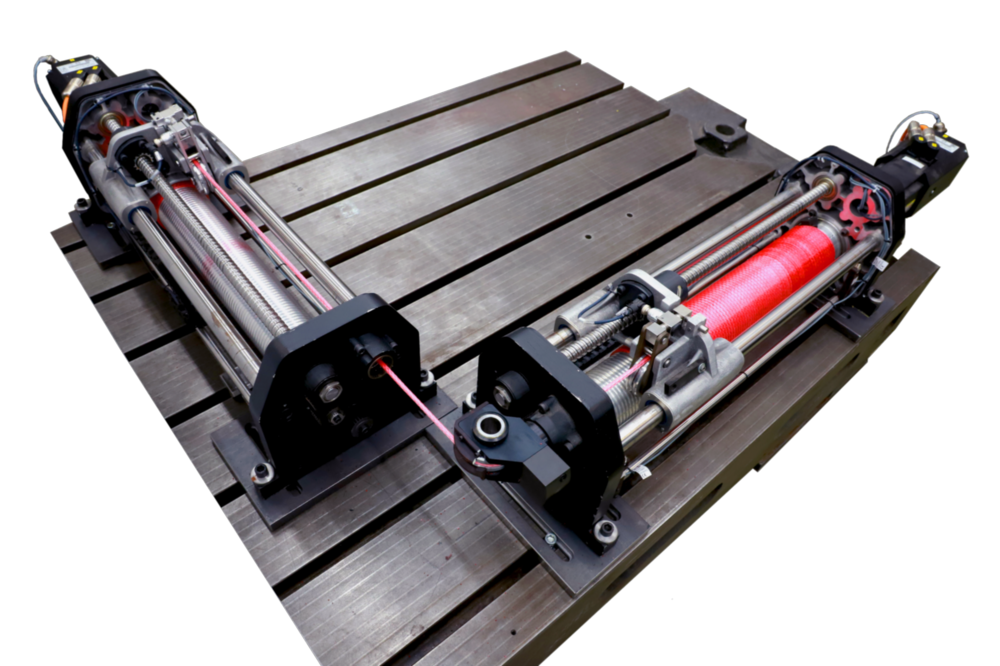
Cable-driven parallel robots are particularly suitable for applications that require a large workspace, highly dynamic movements or a high payload. Due to the low weight of the plastic-fibre-ropes and platform, cable robots can be described as a lightweight type of Gough-Stewart platforms. Compared to serial robots, conventional parallel robots already have a high payload to mass ratio, which a cable robot improves by several orders of magnitude in favor of the payload. The requirements of parallel cable robots to achieve large workspaces, high payloads at high speeds, accuracies and high energy efficiency are contradictory. Due to these contrasts, parallel cable robots have so far only been used in a few industrial areas. The platform of a cable robot is manipulated by plastic-fibre-ropes, which are driven by cable actuation systems. The actuation behavior has a significant influence on the operating characteristics of a parallel cable robot. For example, the current state of research shows that positioning errors of the platform occur due to tracking errors on the cable drive.
Problem statement
Complex relations between the mechanical, electronic and thermal subsystems result in further non-linear operating characteristics of the cable drives. Interference effects occur during the operation of a parallel cable robot, which can currently only be compensated by complex control procedures with corresponding measuring systems on the cable drive and the platform.
Goals
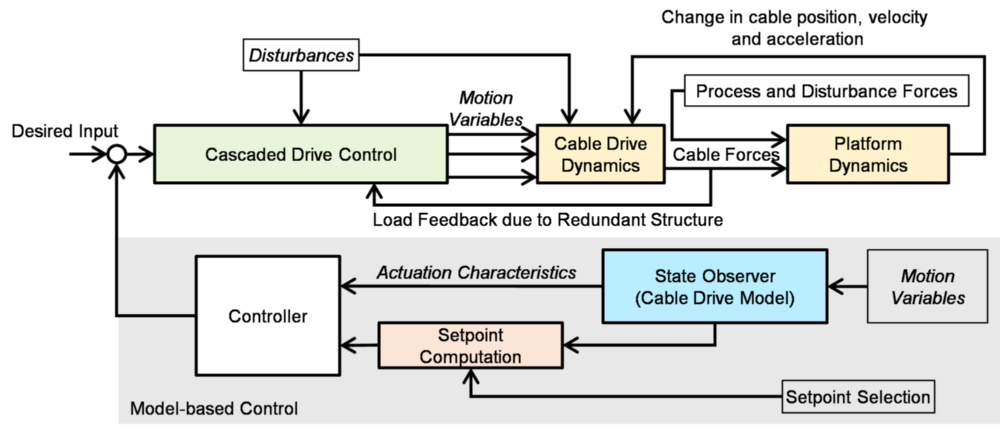
Within this research project, the electromechanical properties of cable drives for cable-driven parallel robots with plastic-fibre-ropes are therefore to be identified. With the identified results, model-based control methods can be designed and implemented, with which it is possible to compensate disturbing effects without additional sensor technology, thus increasing the accuracy, energy efficiency and the speed and acceleration capacity of cable robots.
Get in touch

Thomas Reichenbach
M.Sc.Research Assistant "Mechatronic Systems and Processes"