Projektförderung

Hintergrund
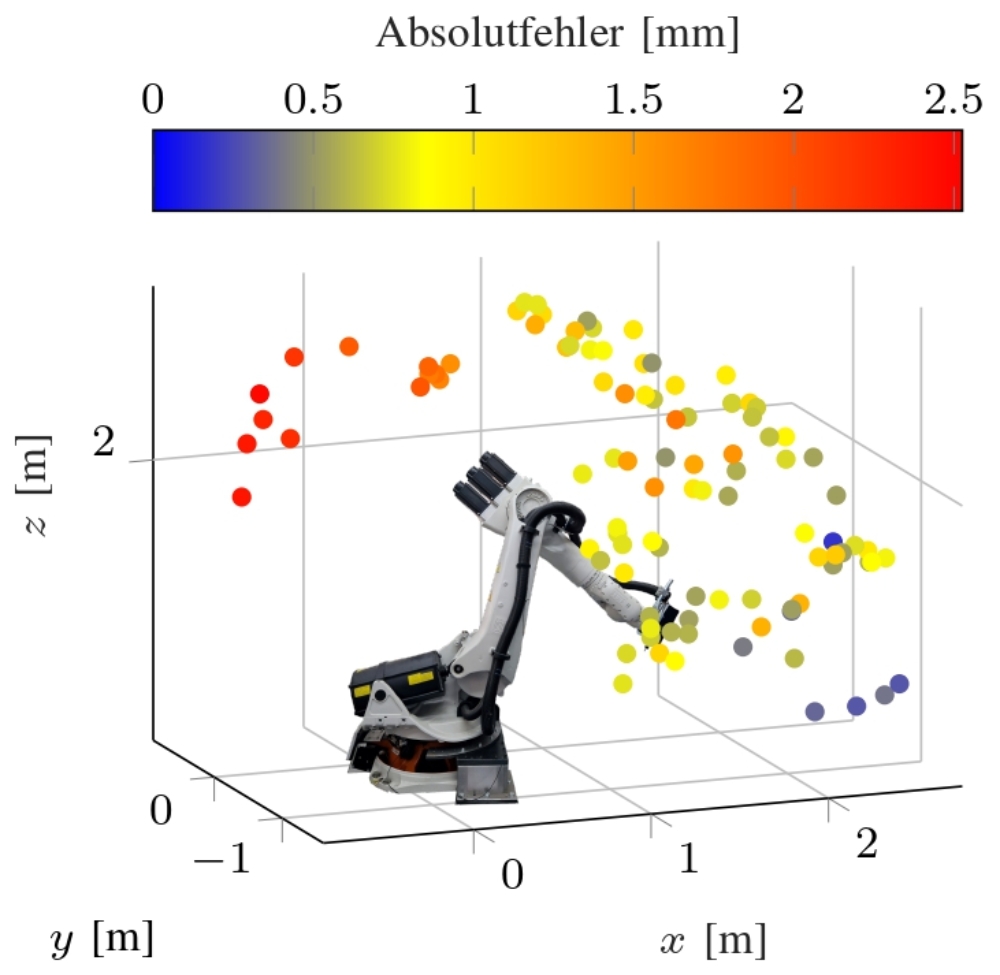
Industrieroboter erfreuen sich aufgrund ihres geringen Kosten-zu-Arbeitsraum-Verhältnisses großer Beliebtheit. Aufgrund der seriellen Kinematik konventioneller Sechsachs-Knickarmroboter geht dies jedoch mit einer deutlich geringeren Steifigkeit als bei konventionellen Werkzeugmaschinen einher. Somit ist der Vorteil des großen Arbeitsraums nichtig, da der maximale Fehler selbst bei vorgenommener Längenkalibrierung am Kuka KR210-2 bei circa 2,5 mm liegt.

Problemstellung
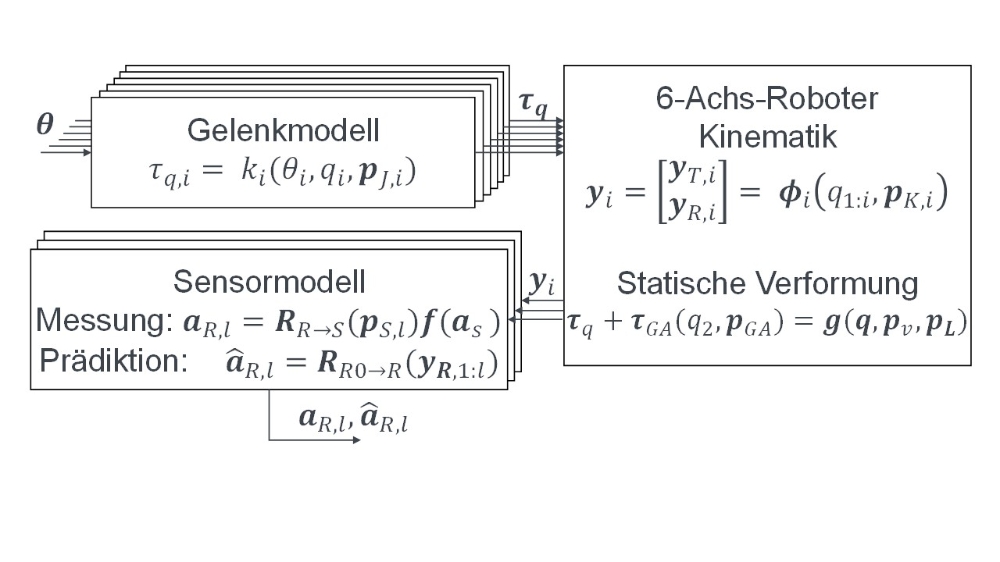
Aufgrund des hohen Eigengewichts der Roboterglieder und der posenabhängigen Hebelarme, lastet dauerhaft ein großes Gewichtsmoment auf den Roboterachsen. Dies wird teilweise konstruktiv verringert. Der Gewichtsausgleich, der als passives Element die Last der Schwinge teilweise kompensiert, trägt dazu bei. Dennoch treten hohe Nachgiebigkeiten im Getriebe, sowie Verformungen an den Gliedern selber auf. Roboterhersteller bieten gegen Aufpreis eine einmalige, werksteitige Kalibrierung an, die diesem Effekt entgegenwirken sollen. Jedoch ändern sich die hinterlegten Steifigkeitskennlinien mit der Zeit und durch Verschleiß. Forschungsgegenstand ist, die Untersuchung von Beschleunigungssensoren zum Zwecke der Parameteridentifikation.
Zielsetzung/Ergebnisse
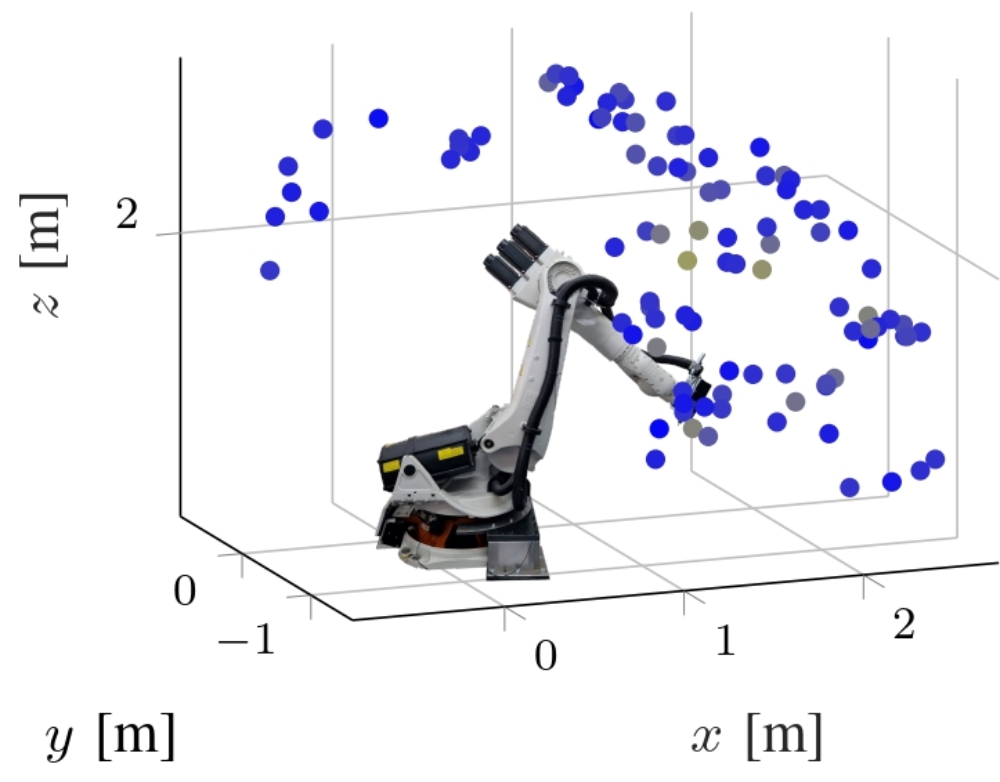
Während eines Kalibrierzyklus können mit Hilfe von vergleichsweise günstigen Beschleunigungssensoren Modellparameter erfasst werden. Diese werden schließlich für eine Online-Kompensation verwendet, mit dem Ziel der erhöhten Positionsgenauigkeit im gesamten Arbeitsraum des Roboters.
Ihr Ansprechpartner

Marcel Dzubba
M.Sc.Wissenschaftlicher Mitarbeiter "Antriebssysteme und -regelung"