Projektförderung

Hintergrund
Industrieroboter bieten gegenüber konventionellen Werkzeugmaschinen signifikante Vorteile in Bezug auf das Verhältnis von Arbeitsraum zu Investitionskosten und einer höheren Flexibilität aufgrund der höheren Anzahl an Freiheitsgraden. Bis heute werden Industrieroboter jedoch nur in begrenztem Umfang für Anwendungen mit hohen Anforderungen an die Bahngenauigkeit eingesetzt, da deren Genauigkeit im Vergleich zu einer Werkzeugmaschine deutlich geringer ist.
Problemstellung
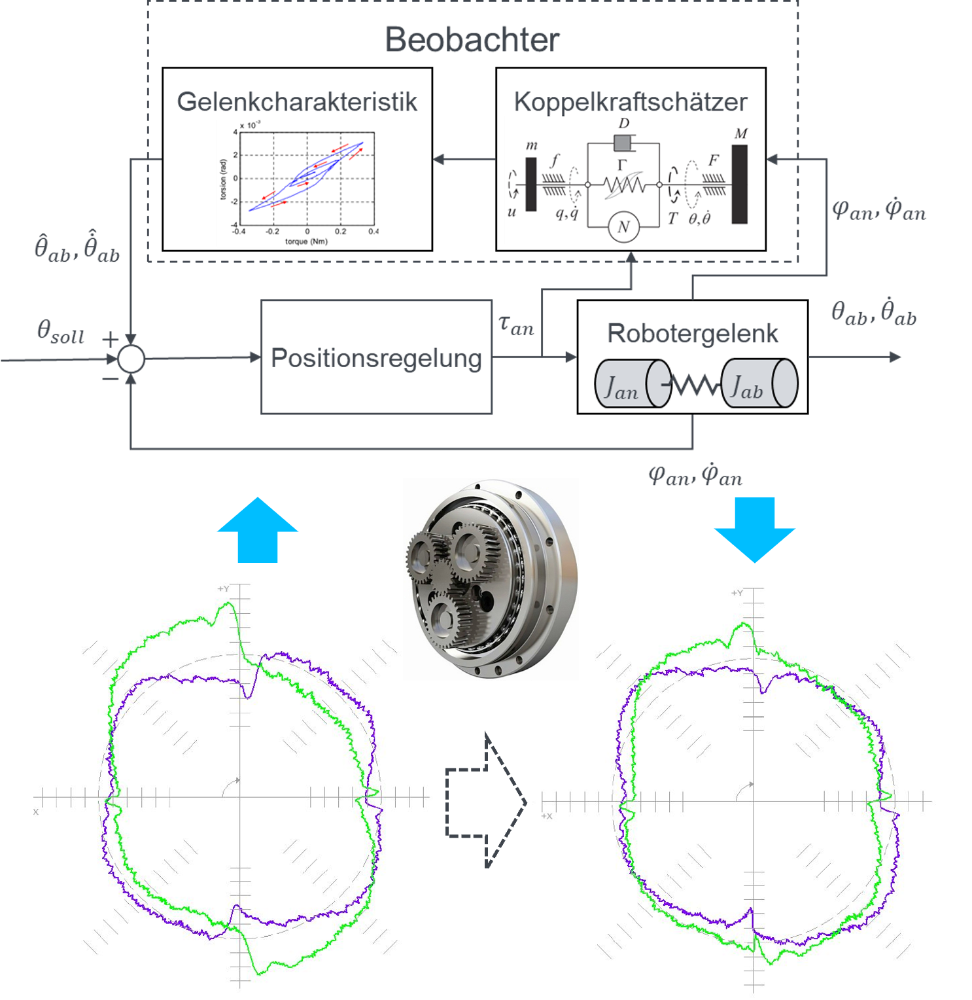
Um neue Anwendungsbereiche von Industrierobotern zu erschließen, muss deren dynamische Bahngenauigkeit gesteigert werden. Einer der Hauptgründe für die auftretenden Bahnfehler ist auf die hysteresebehaftete Charakteristik der in den Robotergelenken verbauten Getriebe zurückzuführen. Für eine modellbasierte Kompensation des Hystereseverhaltens muss die Koppelkraft zwischen An- und Abtriebsseite des Getriebes mit der über dem Getriebe auftretenden Winkeldifferenz eindeutig in Beziehung gesetzt werden. Wobei dafür wiederum ein Modell des Hystereseverhaltens aufgestellt und identifiziert werden muss.
Zielsetzung/Ergebnisse
Im Rahmen des Forschungsvorhabens soll eine neuartige Kompensationsmethode basierend auf dem Konzept eines Koppelkraftbeobachters in Kombination mit einem Hysteresemodell entwickelt werden, um die Bahngenauigkeit von Industrierobotern zu verbessern. Die Identifikation des Hystereseverhaltens und die experimentelle Validierung der Kompensationsmethode erfolgt auf einem Getriebeversuchsstand.
Ihr Ansprechpartner

Nico Helfesrieder
M.Sc.Wissenschaftlicher Mitarbeiter "Antriebssysteme und -regelung"