
Wir forschen interdisziplinär an Technologien für die Produktion und Automatisierung von übermorgen. Die industrielle Anwendbarkeit steht dabei immer im Fokus.
Durchsuchen Sie hier unsere aktuellen und abgeschlossenen Projekte.
Das ISW berät Industrieunternehmen rund um die am Institut bearbeiteten Forschungsthemen und hilft damit, den Transfer von der Grundlagenforschung in die Industrie sicherzustellen. Darüber hinaus werden Firmen bei der Umsetzung von Prototypen bis hin zu neuen Produkten durch das Know-How am ISW entsprechend ihrer Anforderungen unterstützt.

Versuchshalle am ISW
Beratung und Entwicklung
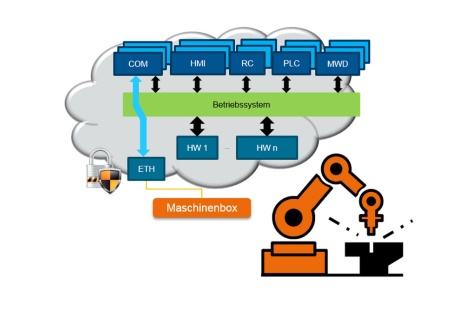
- Steuerungskonzepte, -architekturen und -algorithmen
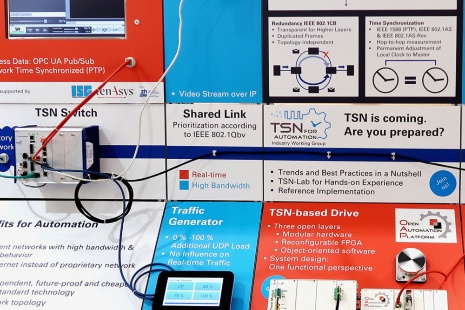
- Kommunikationstechnik (OPC UA, sercos, ProfiNet, EtherCat, TSN)
- Sondermaschinen
- Modellierung und Simulation
- Baukastenbasiertes Engineering
- FPGA-Lösungen
- Maschinen- und Komponentenoptimierung
- Auslegung von Antrieben
- Softwarearchitekturen
- Technologieberatung
- Regelungsverfahren, -parametrierung und -methoden
- Additive Fertigungstechnik
- Positioniergenauigkeitsuntersuchungen an Antriebssystemen
- Security-Analyse von Steuerungen
Schulungen und Seminare
- Stuttgarter Innovationstage
- Lageregelseminar
- Industriearbeitskreis Simulationstechnik
- Ethernet-basierte Kommunikation (OPC UA in der Steuerungs- und Automatisierungstechnik)
- Industriearbeitskreis „TSN for Automation“
- IIC TSN Testbed Plugfest
- Hardware-in-the-Loop-Simulation
- Stuttgarter Produktionsakademie
- OPC UA Workshops zu Companion Specifications
- Einführung in OPC UA - Grundlagen zu OPC UA
- Schulung für die Firma Lapp „Industrial Data Communication - Expert Training“

Eventreihe Stuttgarter Innovationstage


Ihre Ansprechpartner

Armin Lechler
Dr.-Ing.Geschäftsführender Oberingenieur