{kind=link}
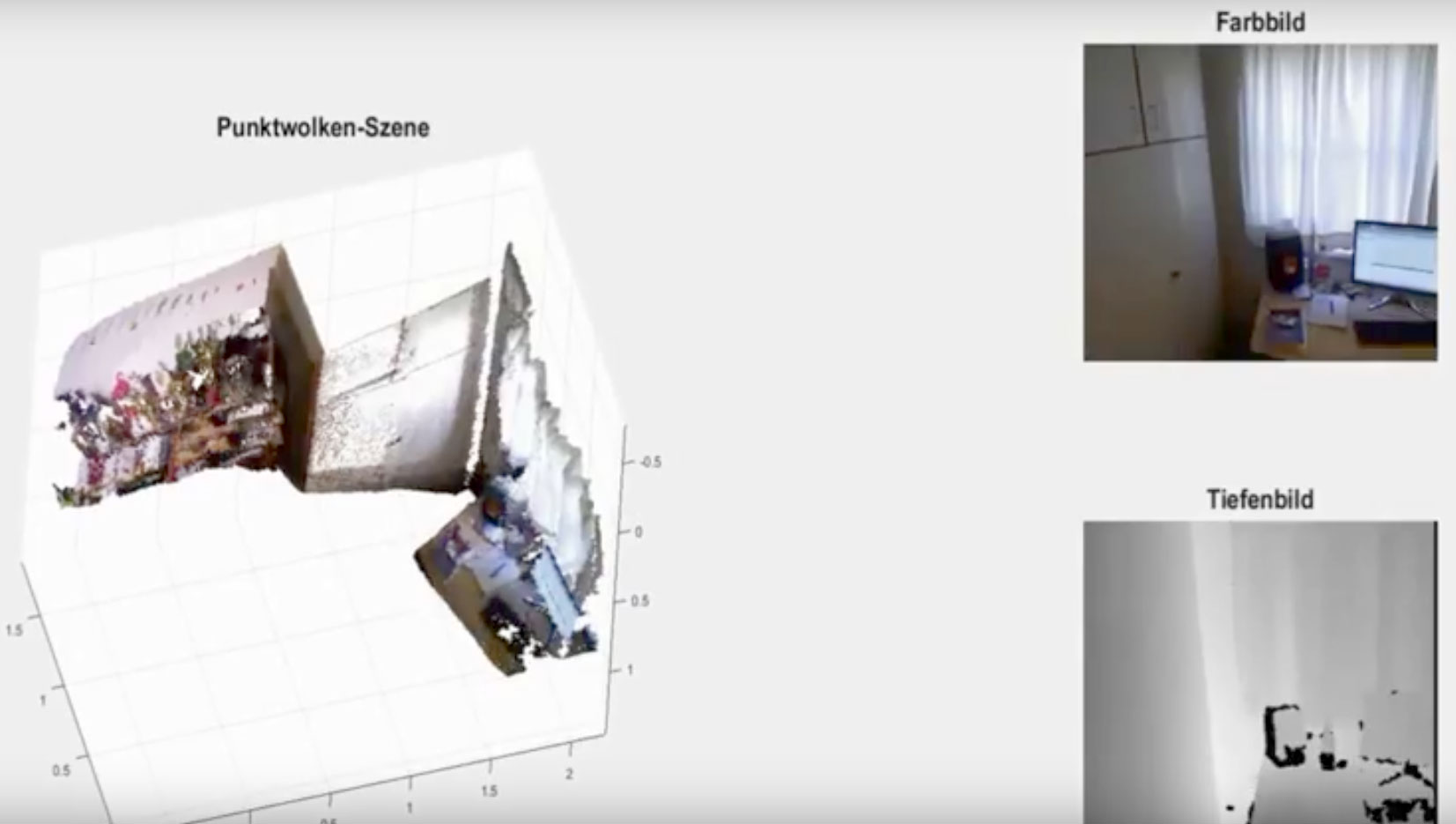
Folgendes Video zeigt die Anwendung eines Verfahrens zur synchronen Lokalisierung und Kartierung (Synchronous Localisation and Mapping/ SLAM) auf Basis von RGB-D Sensorwerten. Das Verfahren registriert die einzelnen Kameraposen und generiert hieraus ein vollständiges metrisches Umgebungsmodell in einer vorab unbekannten Umgebung.