Project funding

Background
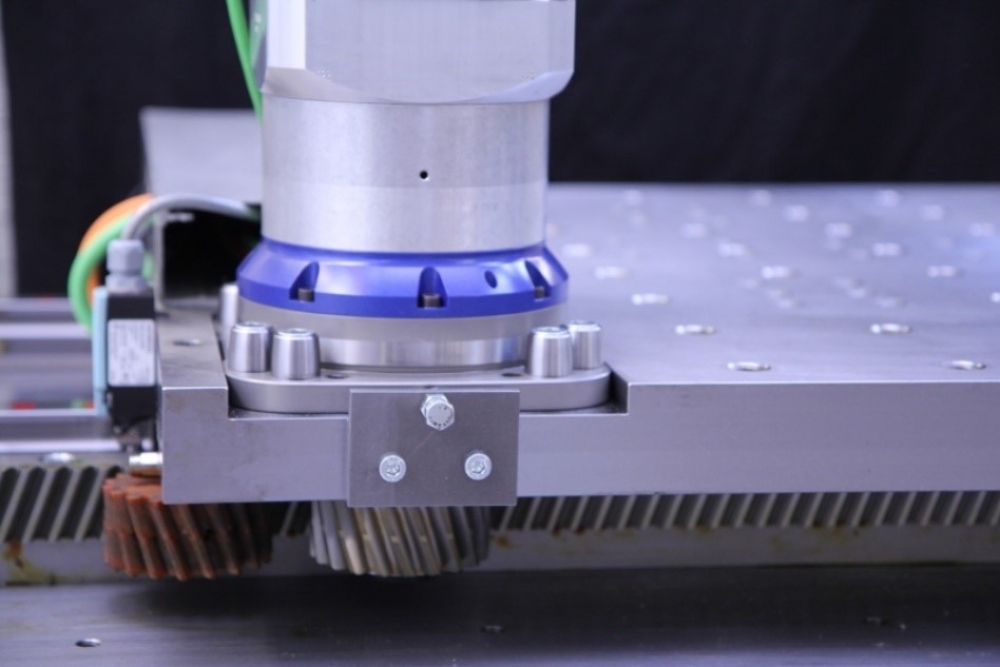
Rack-and-pinion drives (RPD) are the preferred choice to realize long travel distances with high feed forces. By lining up stationary rack and pinion elements, arbitrarily long travel can be realized without negatively affecting the stiffness of the system or increasing the moving inertia. However, a major persisting issue is the limited path and positioning accuracy due to the non-ideal transmission behavior of the gearing.
Problem statement
The transmission behavior describes the uniformity of the feed motion at constant motor speed and thus the relationship between rotation of the motor shaft and translation of the machine table. The transmission ratio assumed to be ideal during design is subject to variations in reality. This is negatively influenced by kinematic errors in the rack, pinion and preceding gearing caused by production and assembly tolerances, as well as by the nonlinear compliance of the teeth in mesh. This results in highly dynamic position deviations that cannot be fully compensated even with direct measurement of the table position. A reliable prediction of the deviations at runtime has not been possible so far due to the high individuality of the kinematic errors in connection with the complex nonlinear compliance. Against this background, approaches to compensate for the synchronization errors have not yet found any practical application.
Goals
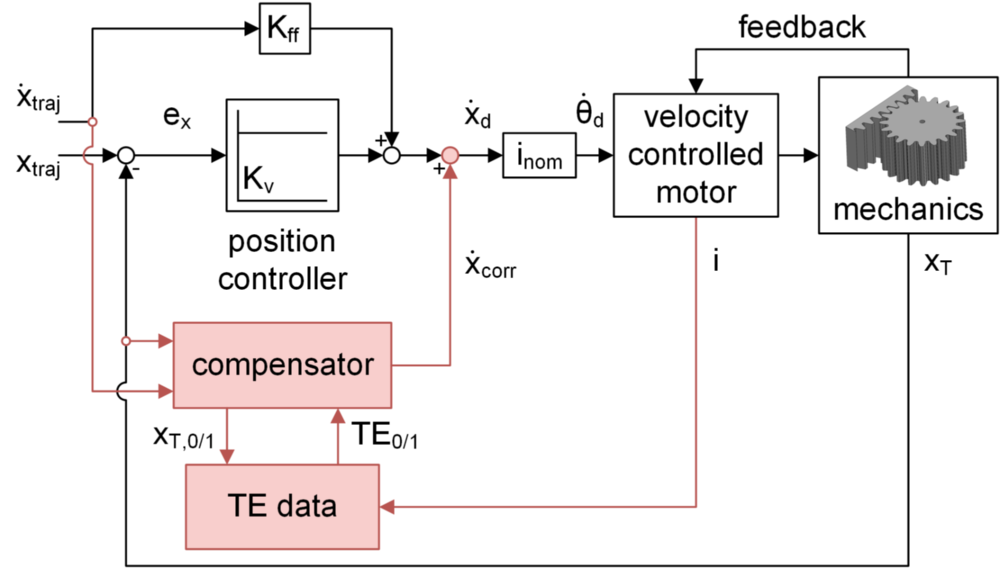
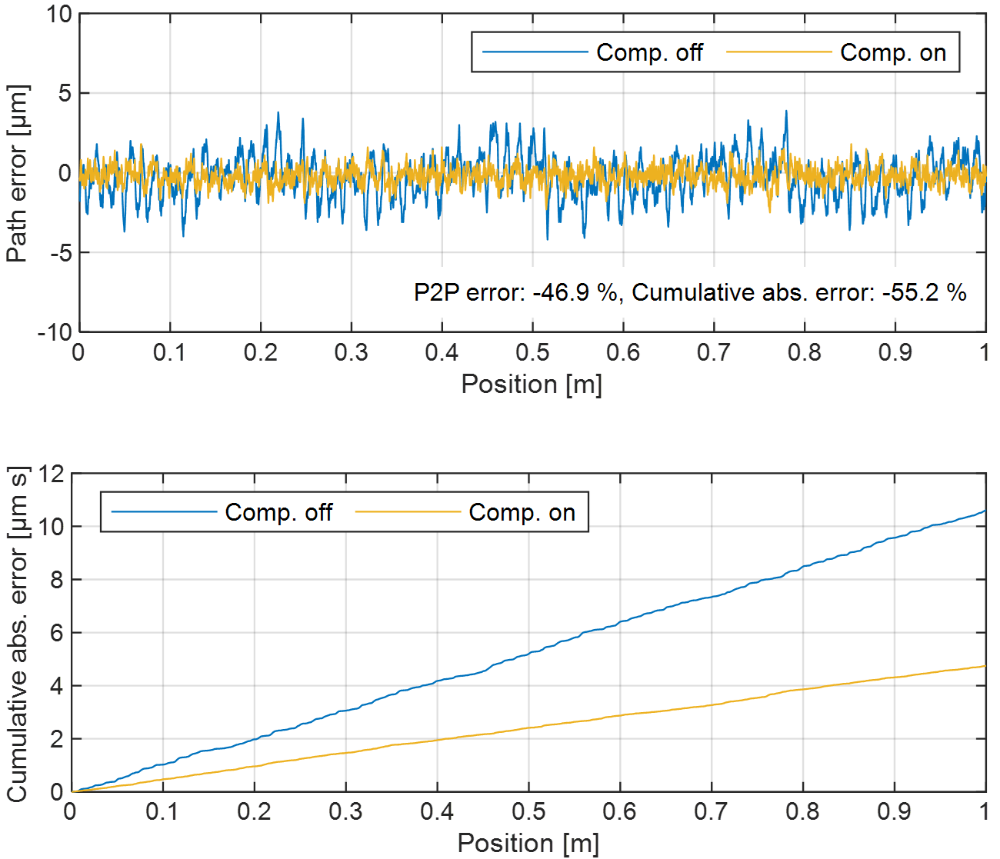
In this project, an approach is being developed to increase the path accuracy of rack-and-pinion drives by compensating for the transmission errors. For this purpose, a compensator is integrated into the drive control system that compensates for the path deviations occurring in the drive train by adapting the motor motion. This is based on state-dependent error models that represent the individual transmission behavior of the respective drive system. Initial model identification takes place during commissioning in the form of a measurement of the kinematic errors occurring during no-load operation. The load-dependent compliance is additionally provided by regression models, which are adapted to the system by machine learning during operation of the drive. Optionally, initial model parameterization can be performed here using stiffness maps determined in FEM simulations. The developed methodology could be validated in first tests on a rack-and-pinion test bench with industry standard components. The measurements carried out show a significant increase in the path accuracy over the entire operating range.
Get in touch

Lukas Steinle
M.Sc.Group Leader "Drive Systems and Motion Control"