Project funding

Background
Ball screw drives (BSD) are machine components that are used for the highly dynamic and nearly backlash-free conversion of rotational into translational motion and vice versa. With the aid of rotating balls that roll against the spindle and nut, forces can be transmitted with good efficiency and comparatively low frictional influences. In addition to high precision in motion conversion, BSDs offer a very good price-performance ratio. Due to their advantages over alternative drive systems, such as linear direct drives or rack-and-pinion drives, BSDs continue to be the most frequently used technology for electromechanical feed axes.
Problem statement
If BSDs are used for defined positioning, compliance and backlash in the drive train must be minimized. For this purpose, BSD are usually initially preloaded. While this preload can also be realized by oversized balls or a pitch offset between the threads, two nut halves clamped against each other are usually used. Contrary objectives apply to the dimensioning of the preload force - high preload is accompanied by minimum backlash and high stiffness, resulting in good static and dynamic transmission behavior of the BSD. At the same time, however, friction increases, whereupon efficiency and - due to increased material stress - service life drop significantly. In the state of research, some approaches for active adjustment of the preload have already been described, but these have not yet been able to establish themselves industrially - mostly due to additional costs, the integration effort and negatively influenced operating properties.
Goals
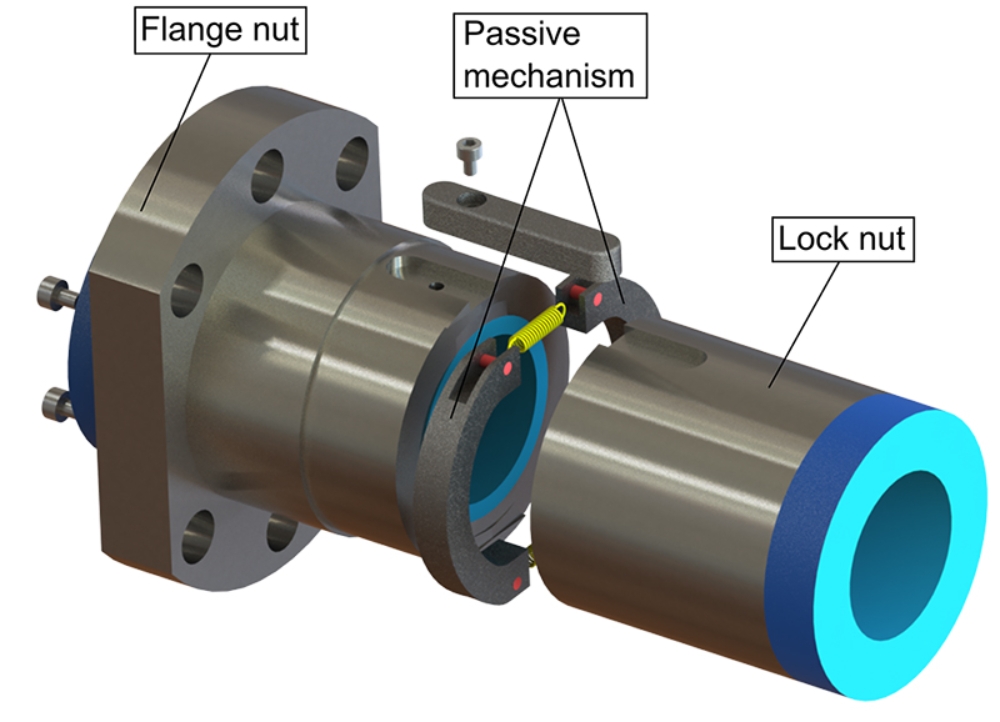
Within the scope of this research project, a novel passive approach for a load-adaptive readjustment of the preload in BSD double nuts will be developed and dimensioned based on simulation. Furthermore, the experimental validation of the manufactured functional sample will be carried out on a wear test rig. The overriding objective is to improve the service life while maintaining the same operating behavior.
Get in touch

Oliver Jud
M.Sc.Group Leader "Drive Systems and Motion Control"