Project funding
Background
Increased functionality of modern onboard networks in electric vehicles consistently increases the complexity of wire harnesses. With a weight of 60 kg and a total length of several kilometers, the wire harness is one of the most cost-intensive components in vehicles. At the same time, mistakes made when handling the wire harness incorrectly are costly, the work with the wiring harness is highly physically demanding, and skilled labor for manual work is scarce. Therefore, the use of robots for handling is investigated in this research project.
Problem statement
Wire harnesses cannot be handled automatically due to a lack of robust processes and models. Processes for wire harness manipulation as well as their necessary models exhibit high uncertainties, which are caused by the deformable behavior of the wire harnesses as well as by uncertainties in the evaluation of the sensors. In order to identify and compensate for these, data sets for targeted manipulation are to be recorded in order to subsequently apply AI methods to them.
Goals
The project is divided into the development of a robust position estimation by means of a light field camera (by IIIT), a model-based correspondence estimation between sensor data and underlying digital branched deformable linear object model (ISW), a parameterization of a skill sequence for manipulation (IFT), as well as robot control, realized via process modules (IPA). The goal of the research project is the assembly of a wire harness based on a real, industrial test scenario, set up as a demonstrator, shown in Fig. 1.
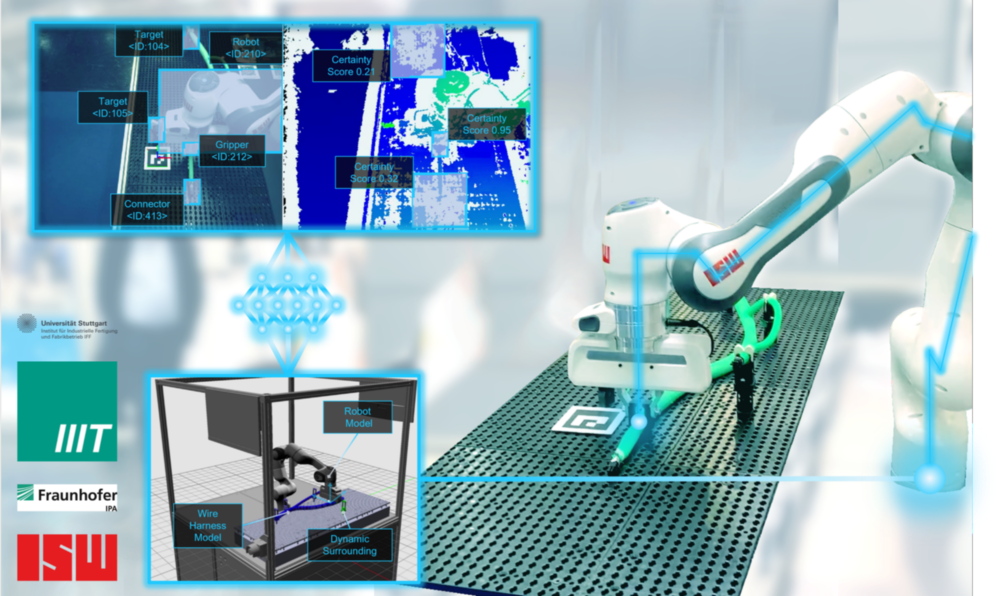
The ISW aims to reduce uncertainties in the detection and modeling of branched deformable linear objects by combining sensor data, model knowledge and experience in the form of training data. The central challenge here is to correlate unambiguous states of digital models with high-dimensional sensor data, e.g., pixel data or point clouds, and to evaluate them robustly.