Project funding

Background
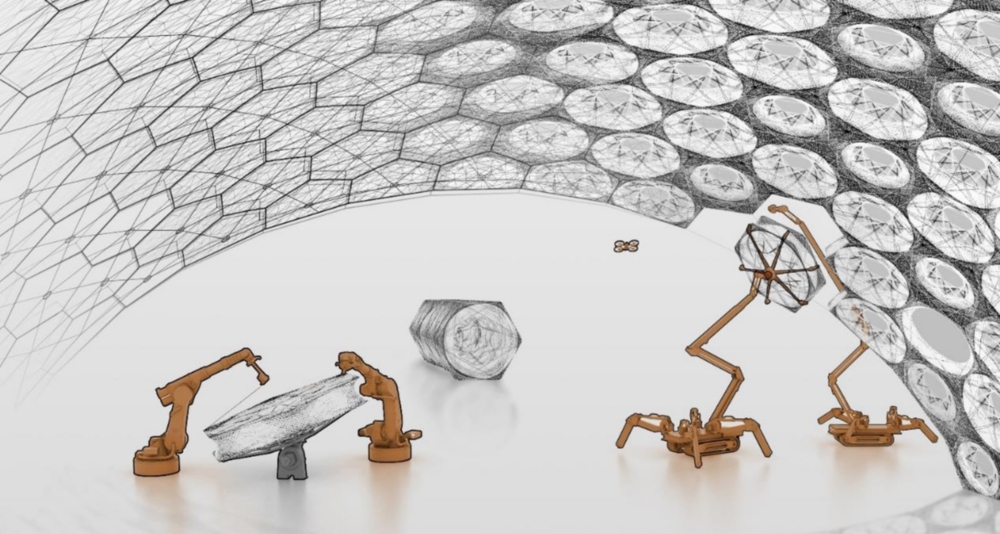
In the Cluster of Excellence "Integrative Computational Design and Construction for Architecture" (IntCDC), methods are being researched that aim to increase the degree of automation in the construction industry. In the IntCDC Research Network 2 "IntCDC for Long-span Buildings", research is being conducted into a process that will enable large and resilient load-bearing structures to be made from fiber-reinforced plastics. For this purpose, smaller, individual modules made of fiber-reinforced composites are to be manufactured away from the construction site, which can then be combined on site to form a large structure. The focus of Research Project 14 (of a total of 19) is on the development of a manufacturing platform for the modules designed in Research Network 2. Several robots are to be used for manufacturing, which will cooperatively operate a newly developed process for laying fibers.
Goals
The overall objective of the project is to build the manufacturing cell in collaboration with the Institute of Aeronautical Engineering (IFB) and the Institute for Computational Design and Construction (ICD). For this purpose, the IFB is developing a novel fiber-laying head that can deploy resin-impregnated fibers. The IFB is also calculating robot trajectories required for module production and creating a comprehensive process simulation.
The Institute for Computational Design (ICD) is primarily concerned with the design of the manufacturing cell. It also aims to identify, address and make sense of the challenges and opportunities presented by the novel manufacturing process in the design process.
The research focus of ISW in FP14 is the design of the cell and the development of an overall cell control system with the following research topics:
- Hardware and software implementation of a novel manufacturing facility with cooperating robots and a complex process.
- Reproducible manufacturing results despite strongly environment-dependent process properties by online adaptation of the paths and process control
- Sensible utilization of kinematic redundancies