
In-house development

Background
The implementation of innovative approaches in control engineering often fails due to a lack of openness and limited performance, especially for complex algorithms such as model-based approaches. Rekonfigurable hardware, especially FPGAs, offer a powerful platform thanks to hardware performance combined with software flexibility.
In order to be able to use this new technology efficiently, the Open Drive Controller Platform was developed at ISW in various research projects. It became apparent that the potential of the technology is not limited to drive technology, but is also suitable for other areas such as process control, communication technology and integration of novel sensors. In order to standardize the developments and maximize synergy effects, all previous developments were merged under the name Open Automation Platform (OAP).
Objectives/results
The architecture enables a standardized connection of the system on communication interfaces. On the one hand for specialized commissioning and research tools, on the other hand a connection to different field buses is possible. Here, another advantage comes into action, because the change from one fieldbus to another does not require a change of hardware anymore, but can be achieved by a change of the FPGA design.
The OAP offers openness on the following three levels.
Hardware
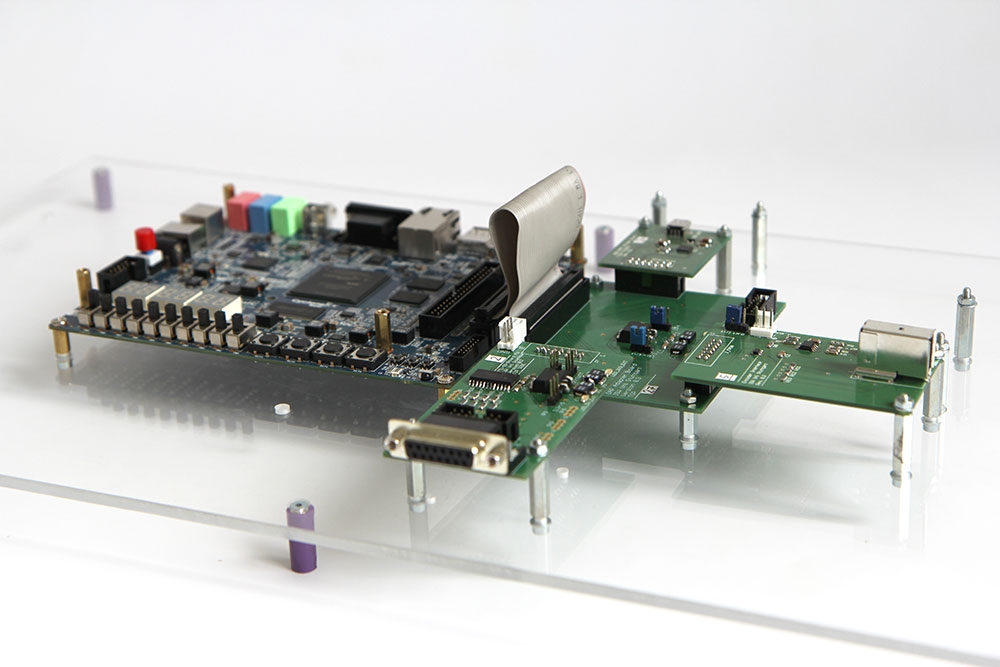
At the lowest level, a large number of interfaces are available, which can be combined in a modular and application-specific manner. These are, for example, drivers, encoder interfaces, power drivers, communication modules, etc. The FPGA itself is coupled to the interfaces via a uniform interface. For most applications, commercially available FPGA prototyping boards are used, thus profitting from the rapidly developing FPGA technology.
FPGA
The FPGA level also has a modular structure. The system-on-a-programmable-chip (SOPC) methodology is used. This enables an efficient system design based on individualized as well as standard components. A steadily growing collection of components is already available, for example for interfaces such as encoders or various fieldbuses, as well as for the implementation of controllers and models.
Software
Two options can currently be used as a platform for the software: Either a so-called soft processor is used, which is synthesized from FPGA resources. Alternatively, software is executed on a hard processor, which is an integral part of the IC (e.g. an ARM processor). Depending on the application, either a special firmware or an operating system can be used. The software also has a modular structure, for which object-oriented concepts are used.
Get in touch

Florian Frick
Dipl.-Ing.Chief Engineer

Wolfgang Bubeck
M.Sc.Research Assistant "Real-time communication and control hardware"

Manuel Weiss
M.Sc.Research Assistant "Real-time communication and control hardware"